 浅析相控阵的角分辨力和精度
浅析相控阵的角分辨力和精度

角分辨力取决于阵列设计,在beamforming时,也与算法有关,不过,在此只谈谈基本问题,不说算法的事。
角分辨力的含义是:比如,如果有两个信号,一个在50度,另一个在52度,(都以某个方向为参考),如果有一阵列,主波束对准50度方向接收信号,但同时52度的信号也进来了,就说明它的角分辨力不够,接收时没法“区分开”这两个相差2度的信号;但如果52度的信号进不来,就说明这个阵的角分辨力至少可以小到2度。——角分辨力越高,越能分辨两个在方向上靠得很近的信号。
上面说的其它信号“进不来”,是需要有量来说话的,通常有-3dB,-10dB等,比期望信号低这么多,就说信号“进不来”。
发的时候,角分辨力的意思也是一样的,如果主波束对准50度方向的用户发信号,结果52度方向的用户受到了干扰,就说明角分辨力不够。同上,有没有受到干扰,也需要用量来衡量。
上面是角分辨力的基本含义,不一定很准确。下面结合我们几张ppt说一下。
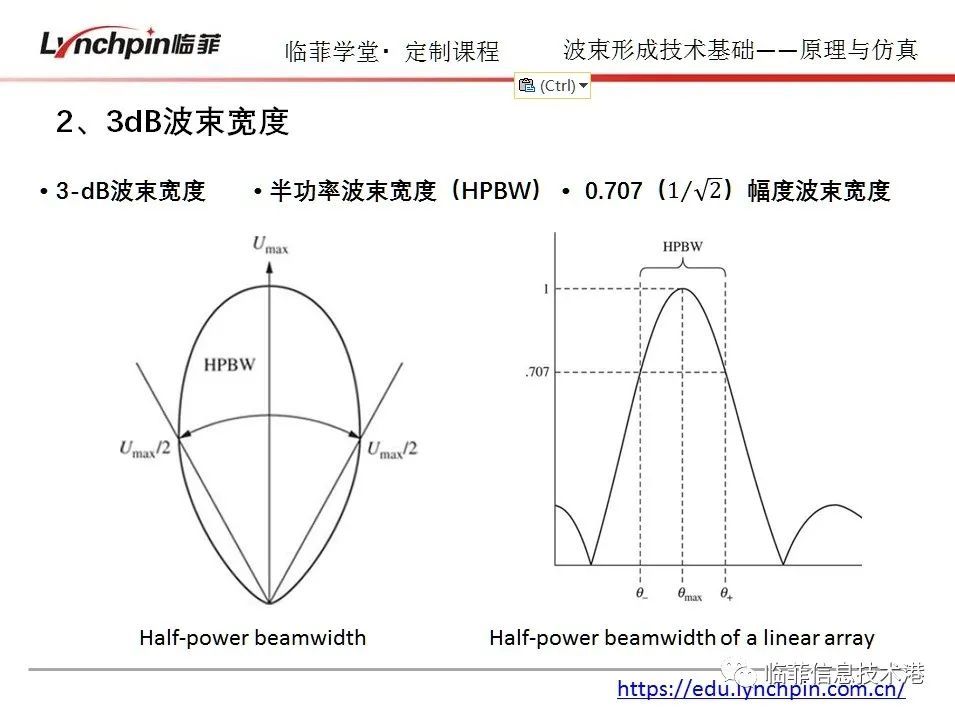
理论上,角分辨力由阵列主波束宽带决定,用3dB波束宽度,或者10dB波束宽带。上图解释了3dB宽带,也就是半功率宽度、0.707幅度宽度。
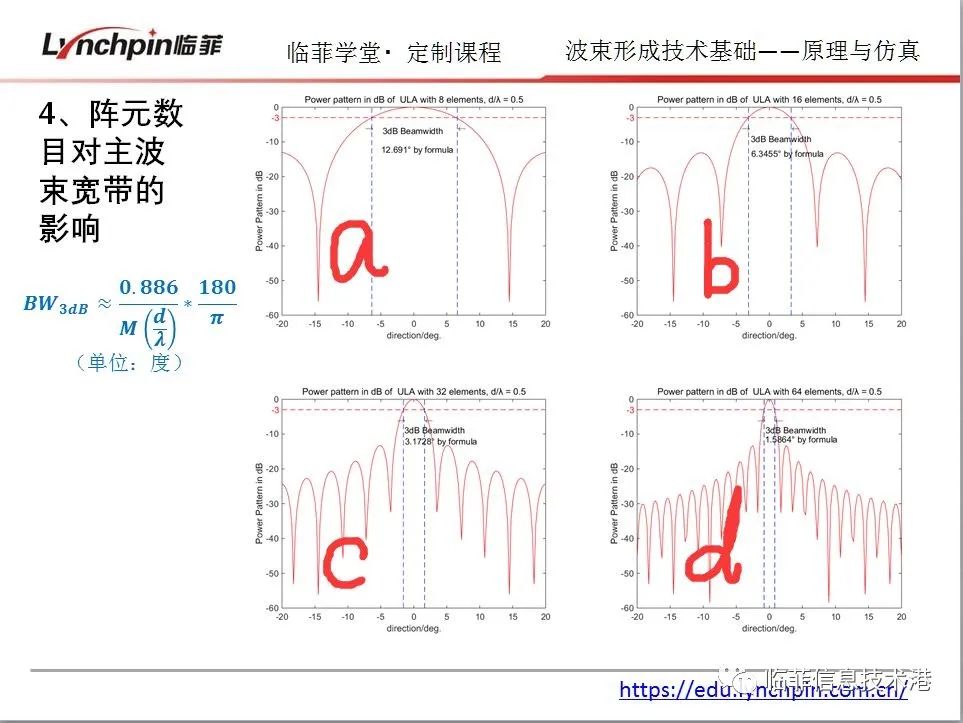
上面的仿真图,给出了均匀线阵的主波束3dB宽度的近似计算公式,显然,与阵元数目和阵元间距有关。另外,a图的波束宽带约为12.7度,它能分辨两个方向差大于12.7度的信号,但如果两个信号的方向差小于12.7度,比如只有5度,这个主波束就把两个信号都“罩住了”,区别不开他们。b、c、d图的3dB波束宽度分别约为6.3度、3度、1.6度(特别强调是近似值哈)。上面4个阵的阵元间距都是半个波长,阵元数分别是8、16、32、64.
下面说一下“准确度”。
角分辨力是衡量能不能在角度上分开两个信号。而准确度是衡量主波束最大增益方向(可以看成是波束的“顶点”)是不是“对准”了期望方向。
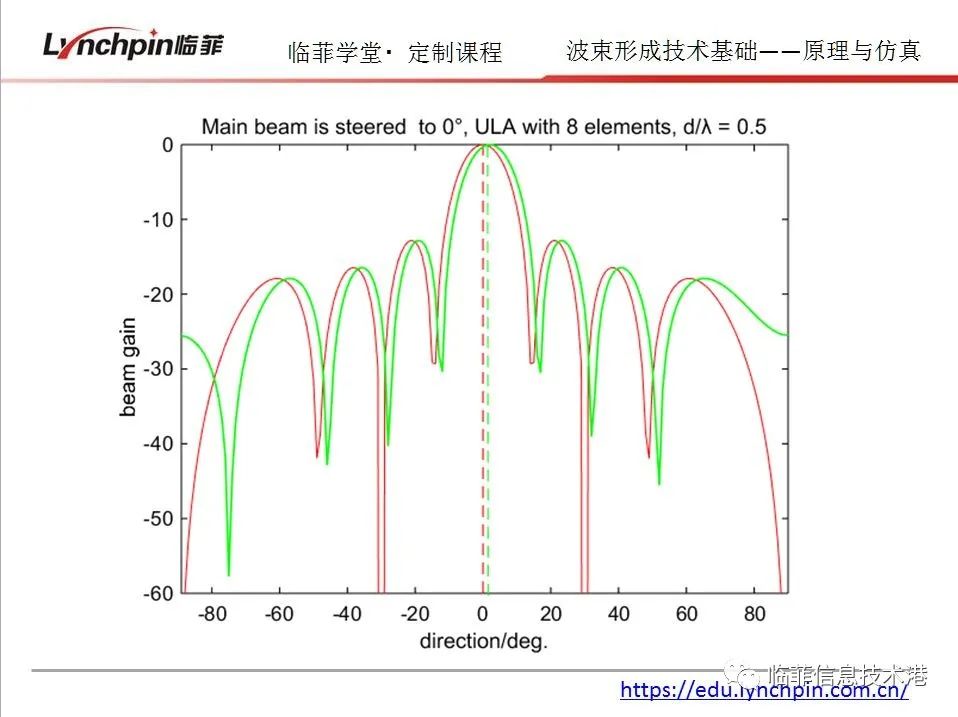
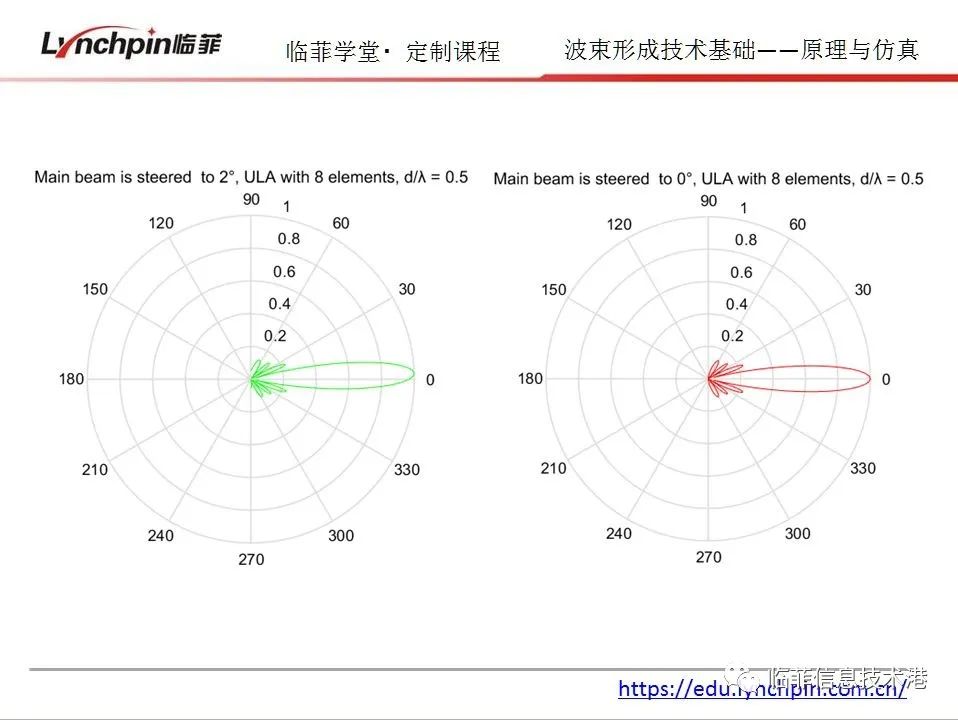
上面的仿真,期望主波束对准0度方向(期望用户方向),红色波束的方向是准确的,而绿色的偏差了,没有对准0度方向。下面是极坐标形式,绿色有偏差,红色是对准的。
“准确”是衡量有没有“对准”,偏差了多少。
再说一下“精度”。
“精度”一般是指能精确到什么程度。比如,能到达1度、0.5度、0.05度等。不同应用对精度有不同要求。软硬件实现时,数字的位数(字的长度)对精度有很大影响。
“准确度”与“精度”的关系
显然,精度不够,也将导致偏差,即导致准确度下降。但二者的概念不等同。
-
相控阵
+关注
关注
3文章
94浏览量
14428
发布评论请先 登录
等延时光缆使用场合及分析

激光干涉仪:解锁协作机器人DD马达的精度密码

MT6825超高频角度编码机制及深空探测器极端工况纳米级角分辨
旋转式测径仪的测量精度和分辨率受哪些因素影响?
深度解析如何利用时延解决方案最大化相控阵性能

请问ADS1256如何提高1KHz输出速率下的精度?
Vivado Xilinx FFT IP核v9.0使用说明

使用ADS1248,为什么电压只能检测到20mV的分辨力?
ADC对于10MHz高精度的采样信号,应该通过什么来构建?
相控阵雷达电源芯片详解
分析DCDC4644电源芯片在F-35战机相控阵雷达的应用
DCDC 4644 电源芯片在相控阵雷达的应用
测长机在测量长度尺寸方面有哪些优势?

功率放大器在测试自制接收机设备的水下声信号波达角测量分辨力中的应用





 工商网监
工商网监
评论