 ЛњЦїШЫвдЙЙНЈвеЪѕзАжУДцдкФФаЉЬєеН
ЛњЦїШЫвдЙЙНЈвеЪѕзАжУДцдкФФаЉЬєеН

NVIDIA ЛњЦїШЫзЈМвЗжЯэДђдьСщЖЏгаШЄЕФЛњЦїШЫвдЙЙНЈвеЪѕзАжУДцдкФФаЉЬєеНЃЌЭЌЪБЫ§ЦкД§зХеЙПЊзджїЛњЦїСьгђЕФаТЦЊеТЁЃ
бЕСЗЁЂВтЪдвдМАЮЊЛњЦїШЫБрТыВЂЗЧвзЪТЁЃЮвУЧзюНќЗЂВМЕФ Isaac ЦНЬЈГаХЕПЩвдИФБфЯжзДЃЌПЫЗўжжжжРЇФбЁЃ
УЛгаШЫФмБШЛњЦїШЫзЈМв Madeline Gannon ИќЧхГўетвЛЕуЁЃЙ§ШЅвЛИідТРяЃЌЫ§вЛжБД§дкЦЅзШБЄжмБпВЈРМЩНжаЕФбаОПЙЄзїЪвЃЌЧБаФзъбаЛњЦїШЫвеЪѕзАжУЁЃ
Ы§НЋжївЊбаОПОЋСІЗХдк Manus ЕФЪзДЮССЯрЩЯЁЃManus ФмЙЛНЋ 10 ИіЙЄвЕБлгыЕЅИіЛњЦїШЫДѓФдСЌНгЃЌеЙЪОШЫЛњНЛЛЅЕФаТЧАбиЁЃ
НёЬьЃЌЪРНчОМУТлЬГеЙРРЛсдкжаЙњЬьНђОйАьЁЃЫ§вЛжБељЗжЖсУыЁЂШЋСІвдИАЕиПЊЗЂШэМўКЭНЛЛЅЩшМЦЃЌОЭЪЧЮЊСЫФмЙЛдкДЫеЙРРЛсЩЯзМЪБЮЊДѓМвеЙЪОетаЉЛњЦїШЫБлСщЖЏгаШЄЕФвЛУцЁЃЪ§жмвдРДЃЌЫ§УПжмЖМдкВжПтжаЭЖШы 80 ИіаЁЪБЃЌЖјУцСйЕФжївЊРЇФбЪЧЃКДгЛњЦїШЫЙЋЫО ABB зтНшСНЬЈЛњЦїШЫЃЌШЛКѓЪЙгУетСНЬЈЛњЦїШЫФЃФтвЊдкеЙРРЛсЩЯеЙЪОЕФШЋВП 10 ЬЈЛњЦїШЫЕФНЛЛЅЧщПіЁЃ
Gannon жївЊвРППФЃФтЧщПіРДДДдьгыЙлжкНЛЛЅЕФГЁОАЁЃЖјЧвЃЌдкжаЙњЯжГЁЦєЖЏВЂдЫаа 10 ЬЈЛњЦїжЎЧАЃЌЫ§ВЂВЛШЗЖЈетбљзіЪЧЗёШЗЪЕгааЇЁЃ
ФЃФтЪЕМЪВйзїжаЕФЛњЦїШЫЛсУцСйвЛаЉЬєеНЃЌетаЉЬєеНДЋЭГЩЯвбЧ§ЪЙЛњЦїШЫзЈМвНјааздЖЈвхБрГЬЃЈИќВЛгУЫЕДѓаЭЖФВЉКЭШУШЫНЙТЧЕФЪТМўЃЉЃЌвђЮЊжБЕНзюНќЃЌШэМўЛЙЮоЗЈЮШЖЈПЩППЕидЫааЁЃ
ШЛЖјЃЌетШдШЛЪЧаавЕжаЕФвЛИіЙиМќЮЪЬтЃЌвђЮЊЮяСївЕЮёКЭВжПтзївЕдНРДдНвРРЕЛњЦїШЫЃЌетаЉЛњЦїШЫОпБИдНРДдНЖрЕФзджїШЈЃЌФмЙЛгыШЫРраЭЌХфКЯЁЃ
ЁАЫцзХЮвУЧДгЛњЦїШЫздЖЏЛЏЙ§ЖЩЕНЛњЦїШЫзджїЃЌРћгУ Manus етбљЕФвеЪѕзАжУЃЌШЫУЧгаЛњЛсЧзЩэЬхбщЮДРДШЫРрШчКЮгызджїЛњЦїЙВДцЃЌЁБЫ§ЫЕЁЃ
ПЩвдПЯЖЈЕФЪЧЃЌGannon ЮЊЪЕЯжДЫДЮеЙЪОРњОЁМшаСЃЌеУЯдСЫИУаавЕДѓЙцФЃПЊЗЂЛњЦїШЫММЪѕЕФаТЖЏЬЌЁЃ
ЛњЦїШЫжњЪжЪБДњЕНРД
ЦфжаДѓВПЗжШддкИФНјЁЃНёФъдчаЉЪБКђЃЌЮвУЧЗЂВМСЫ Isaac SimulatorЃЌгУгкдкащФтЛЗОГжаПЊЗЂЁЂВтЪдКЭбЕСЗзджїЛњЦїЁЃЩЯжмЃЌдк GTC Japan ЩЯЃЌЮвУЧаћВМЭЦГі Jetson AGX Xavier DevkitЃЌвдАяжњПЊЗЂепПЊЗЂЛњЦїШЫКЭЮоШЫЛњЕШзджїЛњЦїЁЃ
ДЫНтОіЗНАИНЋШэМўгыгВМўЯрНсКЯЃЌЭЈЙ§жњСІЫѕЖЬПЊЗЂжмЦкРДЭЦЖЏЛњЦїШЫИяУќЁЃ
ЁАРћгУ IsaacЃЌШЫУЧФмЙЛвдИќПьЕФЫйЖШПЊЗЂжЧФмгІгУГЬађЃЌЁБGannon ЫЕЁЃЁАФПЧАЃЌЮвУЧе§ДІгкЛњЦїШЫММЪѕЕФЛЦН№ЪБДњЁЃЁБ
етВЂВЛЪЧ Gannon ЪзДЮВЮМгЛњЦїШЫОКММЁЃШЅФъЃЌЫ§ЛЙЪЧПЈФкЛљЁЄУЗТЁДѓбЇЕФВЉЪПбаОПЩњЃЌЫ§ПЊЗЂСЫвЛжжНЛЛЅЪНЙЄвЕЛњЦїШЫБлЃЌдкТзЖиЩшМЦВЉЮяЙнеЙГіЁЃ
ЛњЦїШЫ Mimus ЪЧИі 2600 АѕЕФОоШЫЃЌзЈгУгкЙлВьжмЮЇЕФЛЗОГЁЃетПюЛњЦїШЫБЛАВжУдкЙлВьЧјгђЃЌЪЙгУВЉЮяЙнЬьЛЈАхжаЧЖШыЕФДЋИаЦїРДЙлВьКЭНгНќЃЌЩѕжСЪЧИњЫцЫќОѕЕУгаШЄЕФЙлжкЁЃ
дкЬьНђЪРНчОМУТлЬГеЙГіЕФ Manus ЪЧЫ§ПЊЗЂЕФЕкЖўИіЧвИќИДдгЕФЛњЦїШЫзАжУЃЌвђЮЊИУзАжУашвЊЪЙгУздЖЈвхШэМўДгЭЗПЊЪМДДНЈНЛЛЅЁЃ
ДђдьСщЛюгаШЄЕФManus
Дђдь Manus ОјЗЧвзЪТЁЃЕНДяжаЙњжЎКѓЃЌдкПЊЪМетДЮНЛЛЅЪНеЙРРжЎЧАЃЌGannon жЛга 10 ЬьЪБМфдкЯжГЁВПЪ№ШЋВП 10 ИіЛњЦїШЫЁЃManus ЕФЛњЦїШЫдк 9 УзИпЕФЛљзљЩЯХХГЩвЛХХЃЌВЂЧвЪЙгУгаЛњВЃСЇАќЙќЁЃдкЛљзљЕзВПзАга 12 ИіЩюЖШДЋИаЦїЃЌНшДЫЯрЛЅСЌНгЕФЛњЦїШЫФмЙЛИњзйЗУЮЪепЕФвЦЖЏЧщПіЃЌВЂОнДЫзїГіЯьгІЁЃ
ЁАетИіЯюФПашвЊДІРэДѓСПЪгОѕаХЯЂЃЌете§ЪЧЦфДѓФдЪЙгУ NVIDIA GPU ЕФдвђЫљдкЃЌЁБGannon ЫЕЁЃ
РћгУДЫЪгОѕЯЕЭГЃЌManus ПЩвдздЖЏвЦЖЏвдЛигІжмЮЇЕФШЫЃКШчЙћ Manus евЕНСЫгаШЄЕФШЫЃЌЫцзХЦфЛњЦїШЫФПЙтНєЫцдкФПБъШЫЮяжмЮЇЃЌЫљгаЕФ 10 ИіЛњЦїШЫБлЖМЛсжиаТЖЈЯђЁЃ
вЊЮЊ Manus ДДНЈНЛЛЅЩшМЦЃЌGannon ашвЊЮЊЦфЛњЦїШЫПЊЗЂздЖЈвхЭЈаХавщКЭдЫЖЏЧѓНтЦїЃЌвдМАздЖЈвхШЫдБИажЊЁЂдЖГЬМрПиКЭШЫЛњНЛЛЅЩшМЦШэМўЁЃ
Ы§БэЪОЃЌжБЕНЯждкЛЙУЛгаПЩППЕФММЪѕзЪдДЃЌПЩвдгыжЧФмЛњЦїШЫХфКЯЭъГЩЗЧЕфаЭЕФШЮЮёЁЃвђДЫЃЌЫ§УПДДдьвЛИіаТЕФЛњЦїШЫВПМўЃЌЖМВЛЕУВЛзіЮоЮНЕФжиИДЃЌРЫЗбЪБМфзіЮогУЙІЁЃ
Mamus ШэМўЖбеЛЕФММЪѕПЊЗЂДѓдМеМгУСЫШ§ЗжжЎЖўЕФЯюФПЪБМфЃЌжЛЪЃШ§ЗжжЎвЛЕФЪБМфПЩгУгкЯюФПЕФКЫаФФкШнЃЌМДШЫЛњНЛЛЅЩшМЦЁЃ
ЮДРДЛњЦїШЫбЕСЗ
РћгУ Jetson ЪЕЯжМЦЫуЛњЪгОѕВЂРћгУ Isaac Sim бЕСЗЛњЦїШЫЃЌгажњгкПЊЗЂепдкЮДРДЕФРрЫЦЯюФПжаХЄзЊетаЉБШТЪЁЃЖјЧвЃЌЫќУЧЗЧГЃЪЪКЯПЊЗЂКЭФЃФтДѓСПЦѓвЕгУгкВжПтКЭЮяСїВйзїЕФЙЄвЕЛњЦїШЫЁЃ
Gannon ЩУГЄеыЖдетаЉеЯАбЕСЗЛњЦїШЫЃЌЦфПЊДДадЙЄзїв§Ц№СЫЙуЗКЙизЂЃЌЖјЧвЖрФъРДЫ§вЛжББЛГЦЮЊЁАЛњЦїШЫгяепЁБЛђЁАЛњЦїШЫбБЗўепЁБЁЃ
Ы§ЫЪСЫЫЪМчЁЃЁАЯждкЃЌгаСЫ IsaacЃЌЮвЯыЮвУЧВЛдйашвЊЛњЦїШЫгяепСЫЁЃЁБ
д№ШЮБрМЃКХэнМ
-
ДЋИаЦї
+ЙизЂ
ЙизЂ
2567ЮФеТ
53145фЏРРСП
768960 -
ЛњЦїШЫ
+ЙизЂ
ЙизЂ
213ЮФеТ
29829фЏРРСП
213659 -
NVIDIA
+ЙизЂ
ЙизЂ
14ЮФеТ
5324фЏРРСП
106644 -
ащФтЛЗОГ
+ЙизЂ
ЙизЂ
0ЮФеТ
30фЏРРСП
9071
ЗЂВМЦРТлЧыЯШ ЕЧТМ
ЙЄвЕЛњЦїШЫЕФЬиЕу
ЁЖMETA THINKERШЫЛњЙВЩњЁЗШЋЧђЛњЦїШЫВЉРРвеЪѕеЙЗЂВМЛсЪЂДѓОйАь

ХЬЕу#ЛњЦїШЫПЊЗЂЦНЬЈ
ЁОЁИ# ROS 2жЧФмЛњЦїШЫПЊЗЂЪЕМљЁЙдФЖСЬхбщЁПЪгОѕЪЕЯжЕФЛљДЁЫуЗЈЕФгІгУ
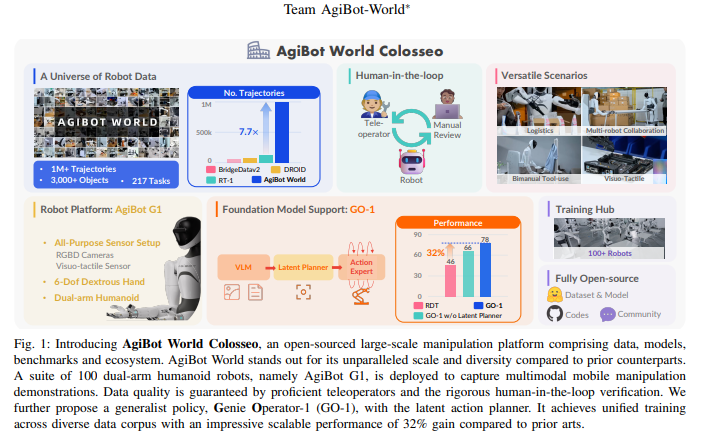
AgiBot World ColosseoЃКЙЙНЈЭЈгУЛњЦїШЫжЧФмЕФЙцФЃЛЏЪ§ОнЦНЬЈ





 ЙЄЩЬЭјМр
ЙЄЩЬЭјМр
ЦРТл