 实现ARM+ROS(机器人操作系统)之运行ROS!
实现ARM+ROS(机器人操作系统)之运行ROS!

如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
1. 准备工作
经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。
本文参考ROS官方文档《Getting started with ROS and Docker》,结合我司的HDG2L-IoT评估套件实现ROS方案完全搭建流程,参考网址如下所示。

2. 选择ROS镜像
目前docker官网提供了搭建好的ROS镜像(支持arm64架构),网址为:

如下所示。
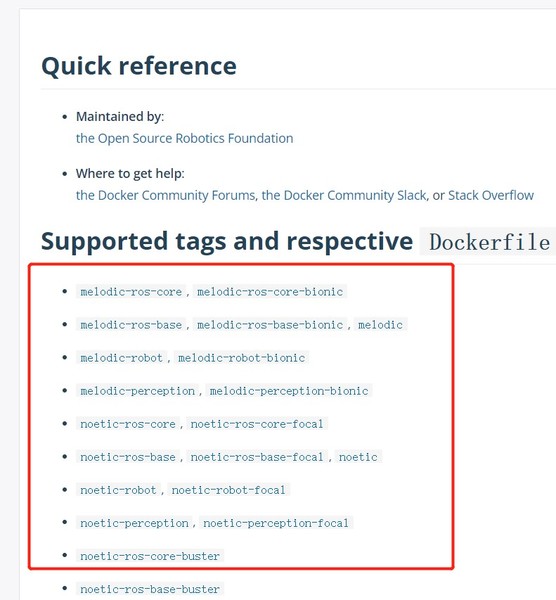
下载命令如下所示,填入上图的字符串。

3. 下载ROS镜像
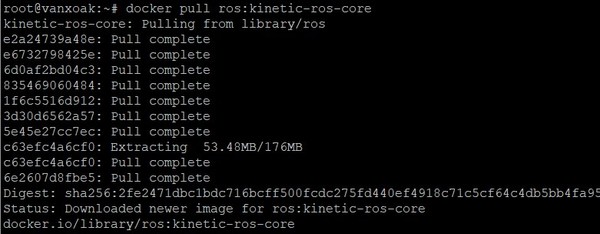
根据项目需求选择合适的ROS镜像,本例以kinetic-ros-core为例,下载命令如下所示。

下载完成如下图所示:
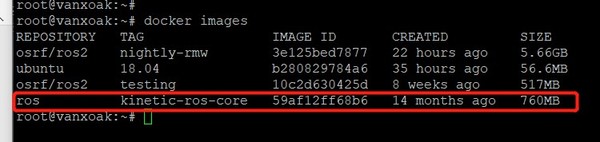
查看镜像的命令:

4. 运行ROS容器
使用下载下来的ROS镜像来启动容器,命令如下所示。

以终端模式进入ROS容器。
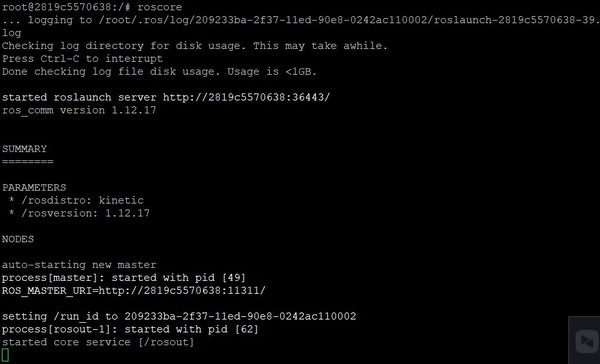
5. 启动ROS应用
进入后运行roscore来启动运行ros节点必要的ROS Master和ROS parameter,运行情况如下所示。
至此,我们通过三篇文章从硬件与底层、环境搭建、ROS运行等方面为大家介绍了一个全新的ARM+ROS的软硬件实现方案。文章中若有不明之处或需要技术问题交流请随时联系万象奥科官方。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ARM开发
+关注
关注
0文章
37浏览量
9863
发布评论请先 登录
相关推荐
热点推荐
硬核上车!RK3576基于Ubuntu部署ROS机器人系统详细攻略(上)
本文适用于瑞芯微RK3562、RK3566、RK3568、RK3576、RK3588等Arm64位SoC,适配开发ROS2系统。各型号触觉智能均有配套核心板及开发板,实现了百分百全国产

基于 ROS + ADI 芯片方案 的 人形机器人子系统级BOM清单(以腿部子系统为例)
基于 ROS + ADI 芯片方案 的 人形机器人子系统级BOM清单 (以 腿部子系统 为例),包括核心感知、执行与通信模块,配合主控系统通过 RO
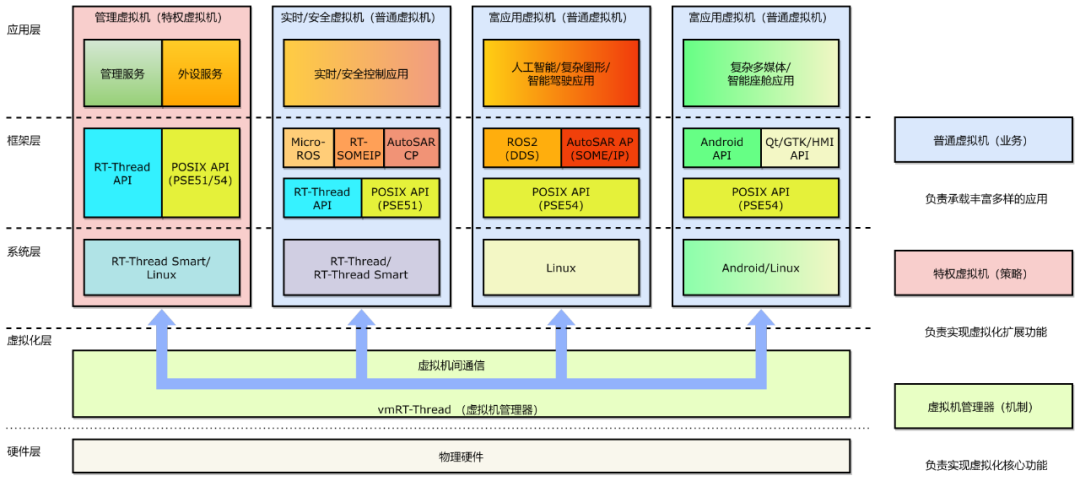
通过vmRT-Thread和ROS2赋能机器人智能开发
随着机器人技术的快速迭代升级,协作机器人、复合移动机器人和人形机器人等新兴应用场景对实时控制与智能决策的深度融合提出了迫切需求。然而,当前机器人
鸿道Intewell操作系统:人形机器人底层操作系统
操作系统的实时性赋能东土科技的鸿道(Intewell)工业操作系统作为国内唯一通过汽车、工业控制、医疗、轨道交通四项功能安全认证的系统,为标准体系中的技术层架构提供了底层支持。其微内核虚拟化架构可将人形
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
2的cv_bridge库,可以轻松实现ROS图像消息与OpenCV格式的转换,这在实际开发中极为便利。
视觉巡线与二维码识别的应用
视觉巡线是机器人自主导航的经典案例,书中从仿真到真实机器
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
的知识,还需要对ROS 2的节点通信和数据处理有一定的了解。通过实践这一部分内容,我掌握了如何在ROS 2中实现二维码识别,这对于提高机器人的智能性和交互性具有重要意义。
地图构建:S
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
规划:导航是机器人自主运行的关键功能。书中详细介绍了基于 ROS 2 的导航系统,包括地图创建、路径规划和导航控制等环节。首先,通过激光雷达等传感器获取环境信息,使用 SLAM(Sim
发表于 04-27 11:24
深开鸿推出全国首个基于开源鸿蒙的机器人操作系统
在智能制造浪潮的推动下,机器人已成为工业升级的核心驱动力。然而,操作系统作为机器人产业的“魂”,直接决定了机器人的智能化水平、协同能力和生态扩展性。长期以来,
做ros0小车仿真实验室stp 文件免费获取方法
做ros小车仿真实验室时,用Solidworks到处urdf文件,但没有四驱轮式机器人三维模型(stp 文件),要去哪里找免费的。(小车型号为ABOT-M1)
发表于 04-09 21:57
全国首个基于开源鸿蒙的机器人操作系统M-Robots OS正式发布,中国机器人产业进入“群体智能”新时代
2025年4月9日,深开鸿在广东省人工智能与机器人产业创新产品与服务新闻发布会上正式发布全国首个基于开源鸿蒙的分布式异构多机协同机器人操作系统——M-RobotsOS(Multi-RobotsOS

研华科技加速智能自主系统与机器人应用发展
研华科技近日举办“智能自主系统与机器人应用伙伴高峰论坛”,将携手生态伙伴,打造灵活且ROS兼容的机器人解决方案。
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
机器人、家用娱乐机器人,大到智能驾驶汽车、人形机器人,都是未来会并存的机器人形态。
不过,当年遵循“提高机器人软件复用率”思想开发的
发表于 03-03 14:18
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联手古月居共同推出首本基于RDK

ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联
发表于 12-10 10:56
?720次阅读





 工商网监
工商网监
评论