 一文看尽SLAM创新点的前世今生
一文看尽SLAM创新点的前世今生

将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进?
SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位,它主要的作用就是让机器人在未知的环境中,完成定位(Localization),建图(Mapping)和路径规划(Navigation)。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域。
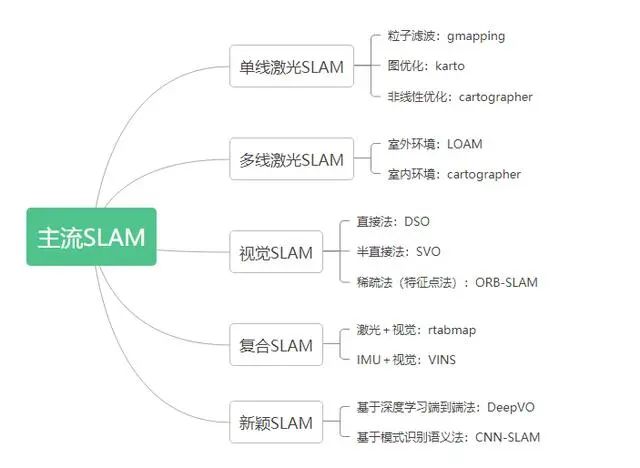
主流的slam技术应用有两种,分别是激光slam(基于激光雷达lidar来建图导航)和视觉slam(vslam,基于单/双目摄像头视觉建图导航)。
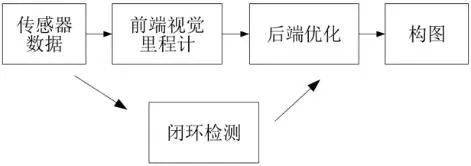
经典的SLAM系统一般包含前端视觉里程计、后端优化、闭环检测和构图四个主要部分。
很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
在机器人slam、无线感知、多模态融合、智能视觉领域有深厚落地经验的Wills老师,将系统性为大家讲解机器人导航相关技术,并带大家分析slam创新点的前世今生。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29846浏览量
213806 -
SLAM
+关注
关注
24文章
444浏览量
32557 -
激光雷达
+关注
关注
971文章
4243浏览量
193151
原文标题:一文看尽SLAM创新点的前世今生
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于深度学习的增强版ORB-SLAM3详解
ORB-SLAM3虽是当前最先进的SLAM之一,但由于使用传统的ORB(定向FAST和旋转BRIEF)特征,在尺度、旋转和光照发生显著变化时可能会表现出局限性。

一种适用于动态环境的实时RGB-D SLAM系统
了UP-SLAM,这是一种适用于动态环境的实时RGB-D SLAM系统。实验结果表明,UP-SLAM在定位精度方面(高出59.8%)和渲染质量方面(峰值信噪比高出4.57分贝)均优于最

恩智浦智能家电创新方案一文看尽 恩智浦智能家电技术日给你答案
,深入探讨了“如何促进传统电器向智能家电转变”这一重要课题,并展示了基于恩智浦丰富的产品组合,面向智能家电应用而打造的数十款创新解决方案。 ? ? ? 活动中展示的智能家电解决方案,基于恩智浦的MPU / MCU、无线连接、电源管

一种基于点、线和消失点特征的单目SLAM系统设计
本文提出了一种稳健的单目视觉SLAM系统,该系统同时利用点、线和消失点特征来进行精确的相机位姿估计和地图构建,有效解决了传统基于点特征的SLAM

一文详解无线电波的前世今生
在忙碌一天后,您回到装有智能家居设备的家里。手机会自动连接到本地网络,室内温度也很舒适,不冷也不热。当您坐在最喜欢的沙发上,插上耳机准备聆听一首动听的乐曲的时候,家里人走过来让您连接设备共享给他一

开源项目是怎么练成的:Horizen EDA 的前世今生
。? ” ? 有兴趣的小伙伴可以先看下作者 Lucas 在 FOSDEM 上的演讲: Horizen 简介 和 KiCad 一样,Horizen 也是一个 PCB 设计套件,包括元器件管理、原理图绘制和 PCB
安泰功率放大器应用:纳米材料的前世今生
,因此在各个领域具有广泛的应用前景。那么你知道纳米材料是如何被发现,又是如何走入我们的生活,获得长足发展的吗?今天Aigtek安泰电子带大家详细了解一下。 纳米材料的前世今生 1861年,随着胶体化学的建立,科学家们开始了对直径
一种基于MASt3R的实时稠密SLAM系统
本文提出了一种即插即用的单目SLAM系统,能够在15FPS的帧率下生成全局一致的位姿和稠密几何图形。 01 ? 本文核心内容 视觉SLAM乃是当今机器人技术与增强现实产品的基础性构建模
利用VLM和MLLMs实现SLAM语义增强
语义同步定位与建图(SLAM)系统在对邻近的语义相似物体进行建图时面临困境,特别是在复杂的室内环境中。本文提出了一种面向对象SLAM的语义增强(SEO-SLAM)的新型


深入了解Java泛型——从前世今生到PECS原则
本文主要介绍泛型诞生的前世今生,特性,以及著名PECS原则的由来。 在日常开发中,必不可少的会使用到泛型,这个过程中经常会出现类似“为什么这样会编译报错?”,“为什么这个列表无法添加

激光雷达在SLAM算法中的应用综述
一、文章概述 1.1 摘 要 即时定位与地图构建(simultaneous localization and mapping,SLAM)是自主移动机器人和自动驾驶的关键 技术之一,而激光雷达则是支撑

MG-SLAM:融合结构化线特征优化高斯SLAM算法
信息和提供准确的全局重建方面表现出显著的进步,而传统系统则基于稀疏点云或体素。然而,NeRF 方法仍然存在过度平滑、场景表示受限和计算效率低下等缺点。最近,基于高斯的 SLAM已成为一种利用体积辐射场

从算法角度看 SLAM(第 2 部分)
作者: Aswin S Babu 正如我们在[第 1 部分]中所讨论的,SLAM 是指在无地图区域中估计机器人车辆的位置,同时逐步绘制该区域地图的过程。根据使用的主要技术,SLAM 算法可分为三种







 工商网监
工商网监
评论