 相机之间为什么要进行双目标定呢?
相机之间为什么要进行双目标定呢?

01 前言
双目相机标定,从广义上讲,其实它包含两个部分内容:
两台相机各自误差的标定(单目标定)
两台相机之间相互位置的标定(狭义,双目标定)
在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。 首先来思考一个问题:为什么要进行双目标定?
这是因为在许多三维重建算法中,我们都要知道两台相机之间的相对位置关系,这样才能进行距离计算。
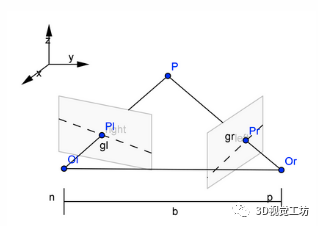
双目标定前后,双目模型对比如下图所示: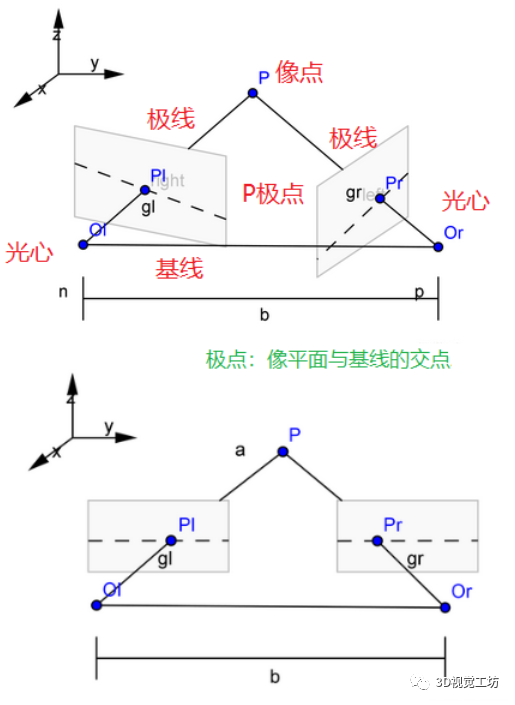
图1 标定模型 [1] 其中:
基线:两个光心的连线称为基线;
极平面:物点(空间点M)与两个光心的连线构成的平面称为极平面;
极线:极平面与成像平面的交线
极点:极线的一端,基线与像平面的交点
像点:极线的一端,光心与物点连线与像平面的交点;
可以看出:
校正前,相机的光心不是相互平行的
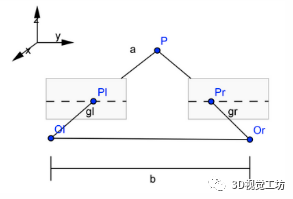
校正后,极点在无穷远处,两个相机的光轴平行,像点在左右图像上的高度一致
标定+校正后图片: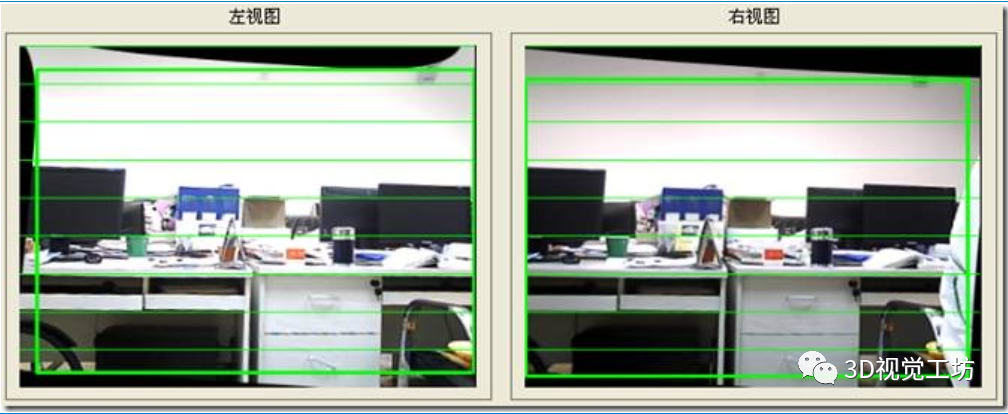
图1 立体校正后左右相机图像发生一定扭曲 [2] 这样的好处是:比如后续的立体匹配时,只需在同一行上搜索左右像平面的匹配点即可,能使效率大大提高。
注:可以看出来,最重要的,我们要知道右相机相对于左相机的位姿关系,那我们才可以做校正!
02 单目理论回顾
先来回顾下单目标定理论,理想的单目相机模型可以简化为(图片来自于[1]):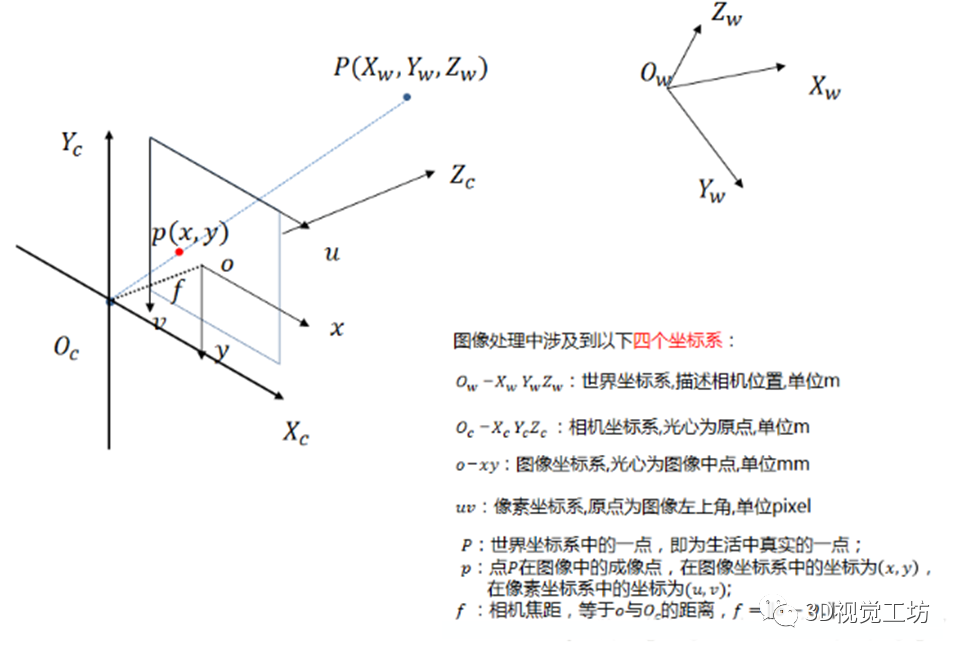
而四大坐标系,包括世界坐标系、相机坐标系、图像坐标系、像素坐标系,它们之间的转换关系如下: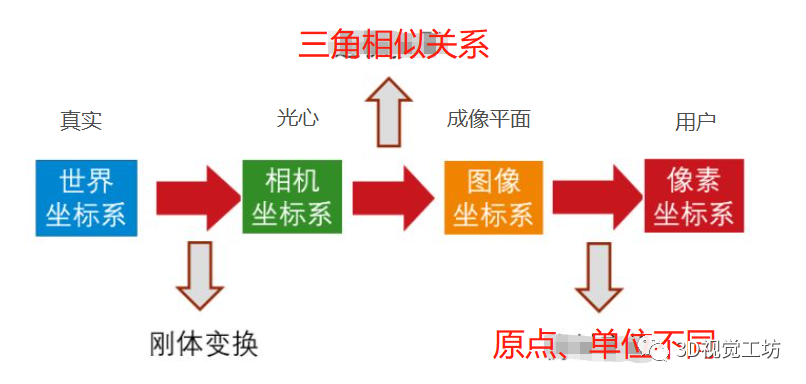
最终,从理想的相机模型,从世界坐标系到像素坐标系的转换关系:
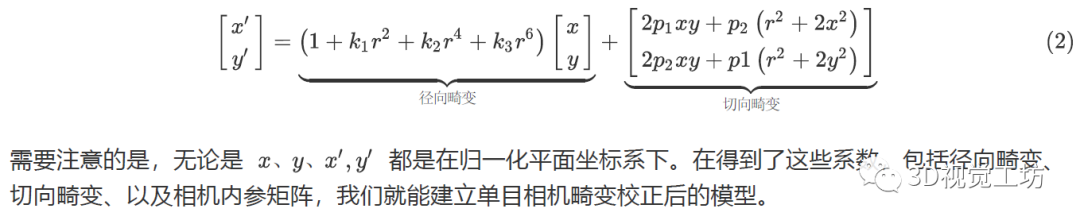
但由于制造原因,使得成像过程(从相机坐标系到图像坐标系转换过程中)存在着畸变,主要有两类,径向畸变和切向畸变,它们可以通过以下公式进行修正:
03 双目标定公式推导
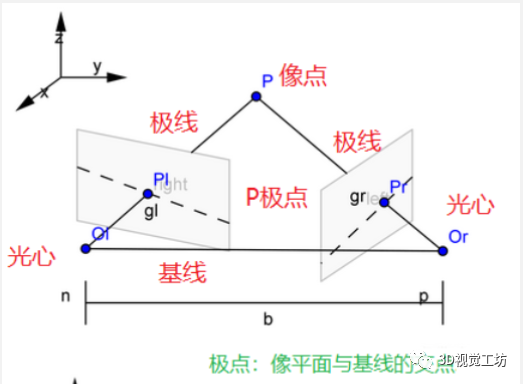
图3 标定模型 [2] 记:
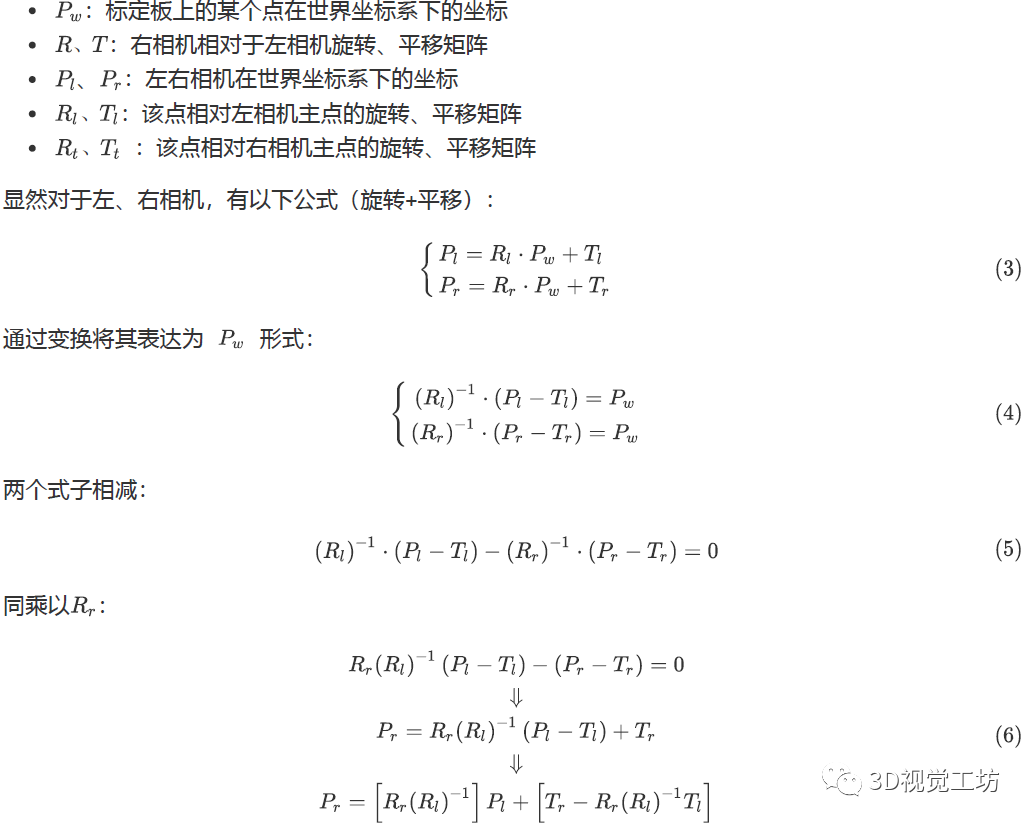
另外,右相机主点相对于左相机主点,显然还有:
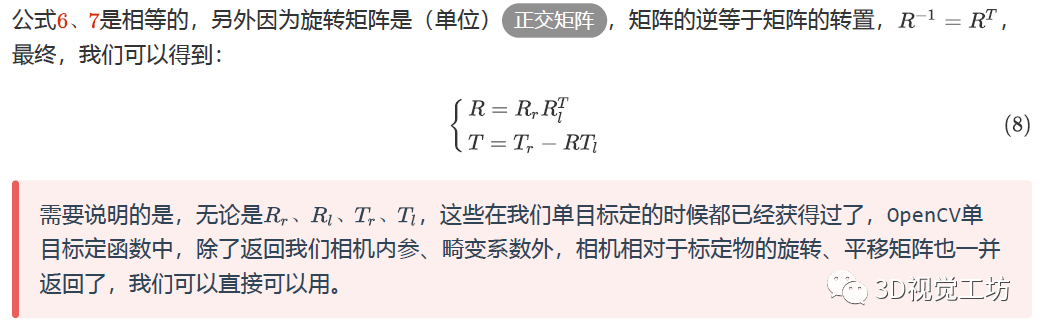
代入上式,因为拍摄了多张图片,利用最小二乘法,也可以是奇异值分解(数学的部分比较复杂,在这里忽略),总而言之,最小化误差,即可得到我们最佳估计的 矩阵,有了这两个矩阵,我们做个旋转、平移就可以了。 注:虽然得到了旋转、平移矩阵,也但是极线校正的方法有很多,这个我们之后讲。
04 极线校正理论推导
双目标定后,我们得到了右相机相对于左相机的位姿关系,也就是R、T矩阵,下面一步即做极线校正。校正好处是之后做立体匹配搜索的时候,只需要在同高度附近进行搜索,大幅提升效率。根据前文的推导,在获取了R、T矩阵后,我们就要进行极线校正(立体校正),使两部相机光轴平行,如下所示:
 |
 |
| 图4(a) 立体校正前 [2] | 图4(b) 立体校正后 [2] |
但是平行的方法有很多,可以:
左相机不动,右相机动。
也可以两部相机旋转到中间等等。
最常见的校正方法就是Bouguet极线校正方法。
Bouguet极线校正方法:左右相机成像平面各旋转一半,使得左右图像重投影造成的误差最小,左右视图的共同面积最大。
具体步骤(这块理论推导可以去看论文,这里只给出结论,看不懂没关系,不妨碍我们使用它):
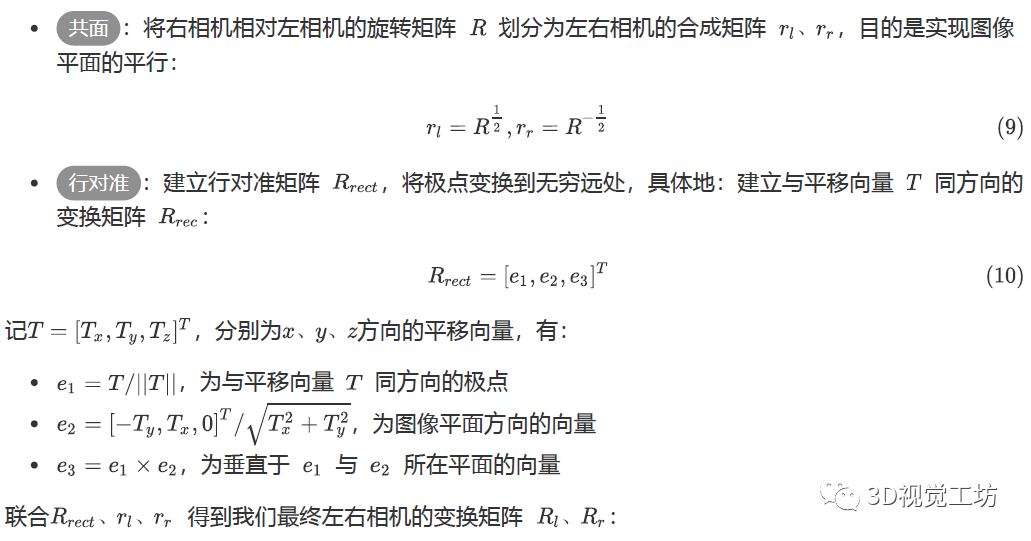

得到这两个变换矩阵,左、右相机分别乘以这两个矩阵即可完成变换,其中已经包含了平移信息!
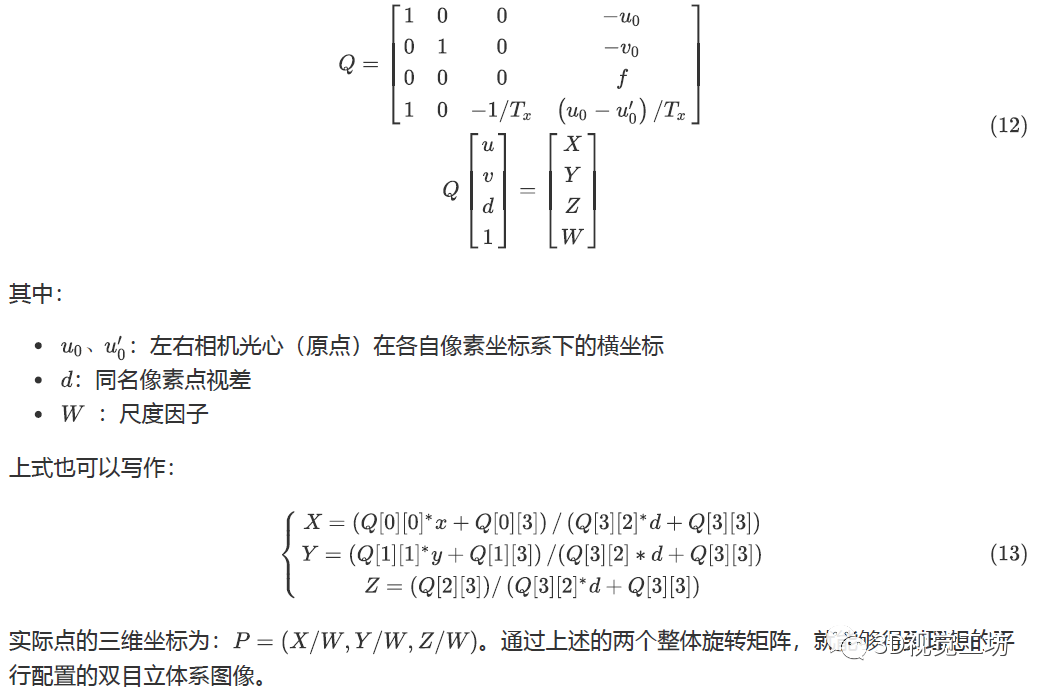
再计算重投影矩阵,其实现了像素坐标系(左相机)到世界坐标系之间的转换:
校正后,可以根据需要对图像进行裁剪,需重新选择一个图像中心,和图像边缘从而让左、右叠加部分最大。
 |
| 图2 裁剪效果演示 [2] |
审核编辑:刘清
-
3D视觉
+关注
关注
4文章
455浏览量
28333
原文标题:一文详解双目相机标定理论
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
奥比中光发布新一代双目3D相机Gemini 435Le
《聊一聊ZXDoc》之汽车标定、台架标定、三高标定

采用LifeCam运行TIDA-00361_LCr3000程序进行到投影仪标定步骤,如何使LifeCam Cinema相机捕捉到投影仪投射的棋盘格图像?
请问DLP4500套件进行投影标定时棋盘格的长宽比是多少?
TIDEP0076相机无法正常调用怎么解决?
想要通过代码控制DLP4500投影,以及连接相机进行外触发,怎么操作?
DLP_LightCrafter_4500_3D_Scan_Application软件进行相机和投影仪标定时,进入相机拍照界面后程序未响应然后退出怎么解决?
TIDA-00254使用SDK进行物体点云重建时在系统标定时DLP不打光,怎么解决?
肇观电子首发自标定3D深度相机
请问做反射式血氧饱和度测量时如何进行标定呢?
什么是高光谱相机?高光谱相机有什么用?


工业相机测长仪的组成部分
技术指南丨深视智能3D相机上下对射测厚操作流程






 工商网监
工商网监
评论