 PLC控制/监控机器人抓手故障的编写
PLC控制/监控机器人抓手故障的编写


选择维护位置
采用“维护”(Maintenance) 按钮(切换功能),可以选择维护位置或对其进行确认。到达维护位置时,其文本将从“维护”变成“维护确认”。
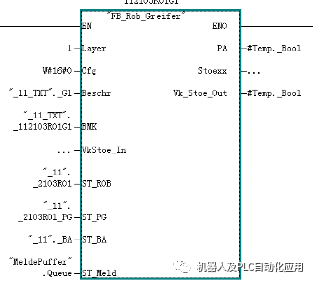
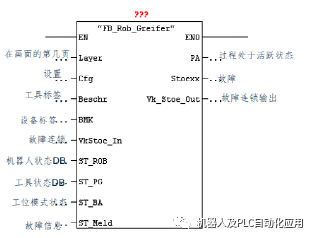
Beschr :工具标签:


机器人反馈故障:
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
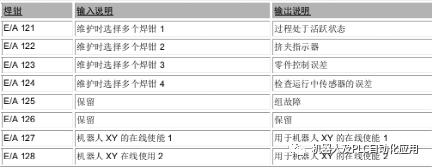
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夹爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件检查错误
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索传感器错误
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125总故障
注: 抓手的报警和别的工具不同,抓手的报警A122 ,A125,A121都是编辑在MAKRO342/MAKRO343里,零件检测A123, A124需要在程序里编辑.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2567文章
53160浏览量
769064 -
机器人
+关注
关注
213文章
29836浏览量
213745 -
plc
+关注
关注
5037文章
14003浏览量
475762
原文标题:VASS :PLC-机器人抓手故障的编写
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
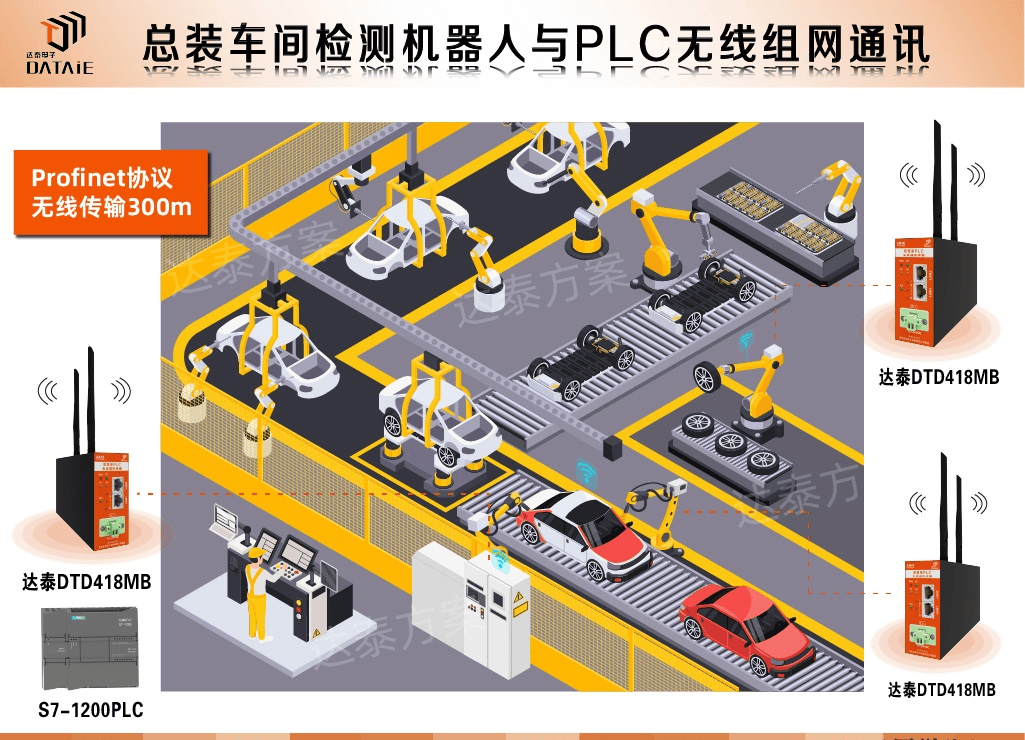
汽车制造车间检测机器人与PLC无线以太网实时控制方案
。检测机器人通过传感器、视觉系统和软件算法采集数据后,将信息传输到就地PLC控制系统中,以实现人机交互、实时监控、数据分析、工艺优化以及生产流程闭环
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
NY-N831-CCLKIE网关的核心在于“双向协议翻译引擎”:
实时数据映射:内置200+工业协议接口模板,将三菱PLC的D寄存器数据(如X/Y轴坐标)自动映射到库卡机器人的Move指令参数,误差控制
发表于 06-04 14:31
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
带)定位、Wi - Fi 定位等。蓝牙定位可以通过与机场内部署的蓝牙信标进行通信,获取机器人的大致位置信息。UWB 定位则利用超宽带信号实现更精确的定位,能够在复杂的室内环境中达到较高的定位精度,误差可控制
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
ABB机器人与西门子PLC通讯案例
在现代工业自动化领域中,机器人与可编程逻辑控制器(PLC)之间的通讯是实现高效、精准生产线的关键。ABB机器人与西门子PLC作为行业内的佼佼
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大
发表于 12-29 23:04
ModbusTCP转Profinet:ABB机器人与PLC的高效连接
在工业自动化领域,不同设备间的通讯和数据交换是系统稳定运行的关键。其中,ABB机器人与PLC(可编程逻辑控制器)之间的协作尤为重要。为实现这一目标,我们常常需要通过特定的通讯协议进行数据的传输和指令
焊接机器人常见故障及排查
的迹象。 检查紧固件: 确保所有紧固件都已正确拧紧,没有松动。 检查过载保护: 如果机器人有过载保护,检查是否因为过载而停止工作。 2. 电气故障 故障现象: 机器人无法启动、电机不工
FMEA在工业机器人故障预防中的应用
在工业自动化领域,FMEA(Failure Mode and Effects Analysis)不仅是一种分析方法,更是提升产品可靠性和安全性的关键工具。通过对工业机器人可能发生的各种故障模式进行





 工商网监
工商网监
评论