 深度相机的应用及结构光的摄像方案
深度相机的应用及结构光的摄像方案

上一期小编给大家介绍了TOF 与双目结构光的对比,那在深度相机的应用方案种还有结构光的摄像方案。今天小编就跟大家来聊一聊结构光,顺便也捋一捋这三者的对比。
结构光
结构光技术就是使用提前设计好的具有特殊结构的图案(比如离散光斑、条纹光、编码结构光等),然后将图案投影到三维空间物体表面上,使用另外一个相机观察在三维物理表面成像的畸变情况。如果结构光图案投影在该物体表面是一个平面,那么观察到的成像中结构光的图案就和投影的图案类似,没有变形,只是根据距离远近产生一定的尺度变化。但是,如果物体表面不是平面,那么观察到的结构光图案就会因为物体表面不同的几何形状而产生不同的扭曲变形,而且根据距离的不同而不同,根据已知的结构光图案及观察到的变形,就能根据算法计算被测物的三维形状及深度信息。
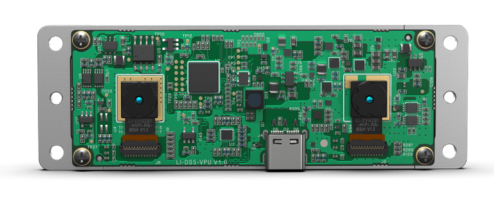
结构光3D成像技术主要由4大部分组成:
1)不可见光红外线(IR)发射模组:用于发射经过特殊调制的不可见红外光至拍摄物体。
2)不可见光红外线(IR)接收模组:接收由被拍摄物体反射回来的不可见红外光,通过计算获取被拍摄物体的空间信息。
3)镜头模组:采用普通镜头模组,用于2D彩色图片拍摄。
4)图像处理芯片:将普通镜头模组拍摄的2D彩色图片和IR接收模组获取的3D信息集合,经算法处理得当具备3D信息的彩色图片。
双目视觉 Vs 结构光 Vs TOF
下表是双目立体视觉、结构光、TOF三种可以测量深度(距离)的技术方案综合比较:
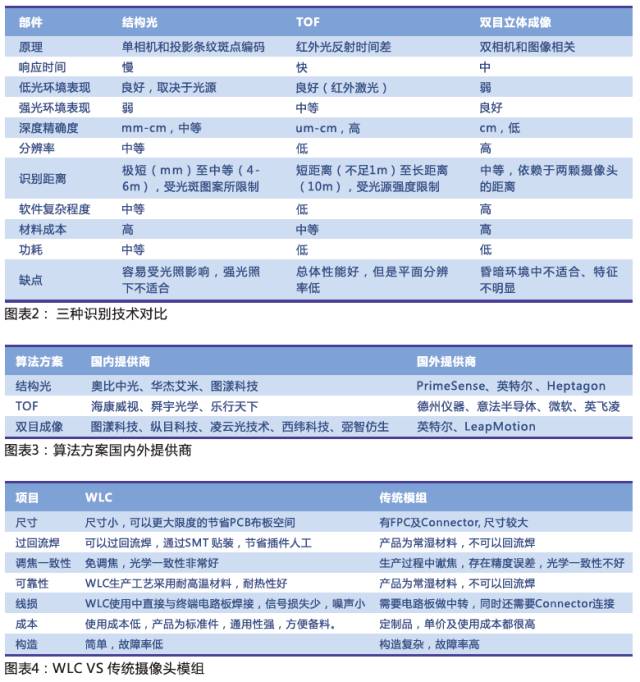
(点击看大图)
从上述的对比分析来看,TOF方案具有响应速度快,深度信息精度高,识别距离范围大,不易受环境光线干扰等优势。因此想要在移动端直接实现深度的测量,最有竞争力的就是TOF方案了。
典型手机
典型代表手机:联想Phab 2。
目前可以买到的具备直接深度测量的智能手机只有Google和联想合作的联想Phab 2,2016年11月推出,是全球首款支持Google Project Tango技术的手机,其深度相机采用TOF技术方案,由PMD公司提供。
华硕也宣布将在2017年会推出带深度相机的手机Zenfone AR,号称是全球首款同时支持Google Project Tango(AR)和Daydream(VR)的手机。
iPhone8也将会使用深度相机,果然收购PrimeSense公司是有目的的,我们拭目以待。
深度相机应用
深度相机的应用范围非常广泛:比如未来几年将会迅速商业化的手势识,以及活体人脸识别、空间测距、三维重建、AR(增强现实)等领域。
1、手势识别。
TOF深度相机可以将人脸、身体、手臂、手指从背景中分离,并且这种分割置信度较高,不受自然光变化的影响,同时能够实时性处理,所以这将在智能交互领域大有用武之地。预计最近几年会迅速进入消费级电子产品中。
2、真实的AR游戏体验。
如下图是Phab 2的AR游戏展示。由于在二维图像中融合了实时的深度信息,所以AR游戏的体验比较真实。比如虚拟出来的一只猫,通过实时的空间深度感知,它可以“感受”到空间的相对位置关系,当它走到桌子边缘的时候,会很自然地跳到地面上,这在之前的AR游戏中是难以实现的。
3、三维空间测量。
由于能够实时获得深度信息,所以实现三维空间测量也是顺其自然的。比如在室内装修领域,可以方便的将各种虚拟的家具以真实的尺寸摆放到现实环境中,用户拿着手机就可以体验家居放在室内的360°真实效果,这无疑将是一个令人激动的应用场景。
4、三维扫描/重建。
可以用于三维物体和k建模和机器人视觉导航和定位。比如你看到一座非常喜欢的雕塑,就可以利用手机上的彩色相机+深度相机对它扫描一周,结合相应的算法就可以生成该雕塑的三维模型数据,利用三维打印机就可以方便的打印出一个三维的雕塑复制品出来。
5、更广泛的其他应用。
融入了深度信息的三维影像可以用于活体人脸识别,避免传统二维人脸识别的安全隐患;可以更加方便进行人体三维测量,从而推动虚拟在线试衣行业的发展等。
随着深度测量技术的发展,必然还有出现更多有趣的应用场景。
原文标题:结构光3D成像原理及应用
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
3D
+关注
关注
9文章
2965浏览量
111424 -
Ar
+关注
关注
25文章
5163浏览量
173469 -
图像处理
+关注
关注
27文章
1328浏览量
58308
原文标题:结构光3D成像原理及应用
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
奥比中光发布最新一代3D激光雷达及双目深度相机
OCAD应用:双光楔扫描型系统初始结构设计
可智能深度学习的AI摄像机模组方案
使用DLP4710-LC做结构光实验,请问哪里可以下载到对应光机的SDK?
用DLP3010evm-lc的trigger out2接工业相机的光耦输入,无法触发相机拍照怎么解决?
如何用PC来控制DLP2000EVM来投影结构光图案?
对于结构光测量、3D视觉的应用,使用100%offset的lightcrafter是否能用于点云生成的应用?
超越视界 全面感知,光鉴科技Nebula 400深度相机正式发布

VirtualLab Fusion应用:用于光导耦合的倾斜光栅的分析
VirtualLab Fusion应用:如何建立一个真实光栅结构的光导
英特尔推出全新实感深度相机模组D421
深度剖析:光谱摄像集成智能云台驱动方案技术
立体视觉新手必看:英特尔? 实感? D421深度相机模组
友思特方案 多相机的完美闭环:proFRAME车载全景环视相机数采方案






 工商网监
工商网监
评论