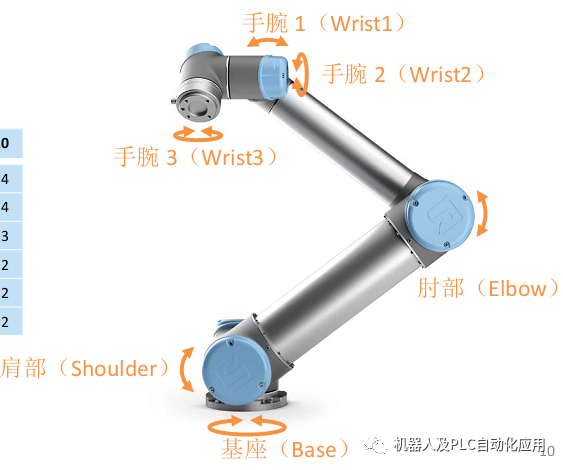
 优傲机器人简单操作及PolyScope软件系统介绍
优傲机器人简单操作及PolyScope软件系统介绍

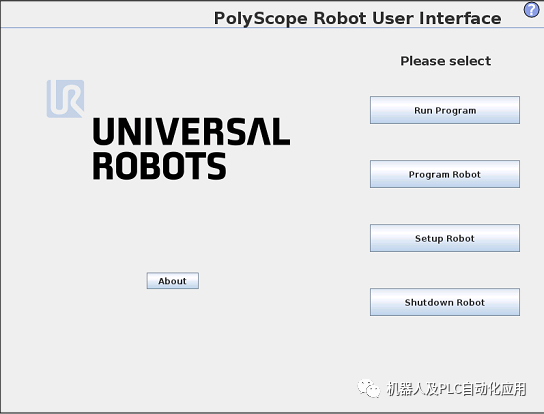
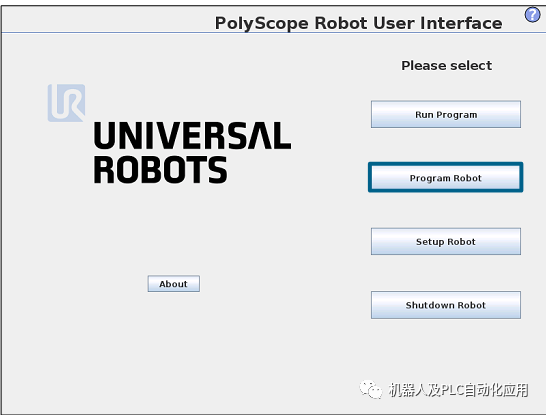
PolyScope软件系统介绍:
PolyScope
? 优傲公司开发
? 免费更新
? Debian Linux
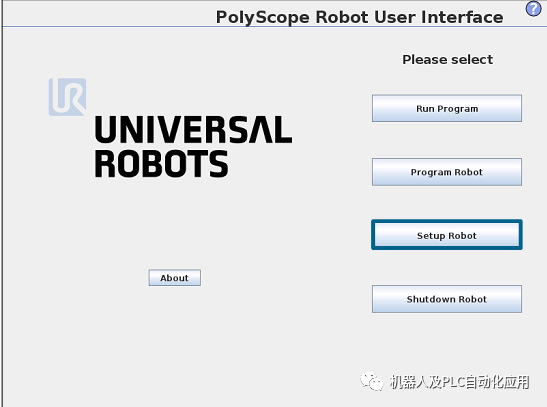
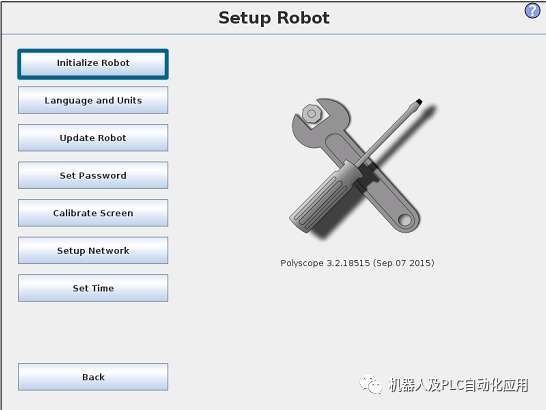
设置机器人
? 针对系统软件的设置
? 系统软件设置
? 初始化机器人
? 语言和单位选择
? 更新机器人
? 设置密码
? 校准屏幕
? 设置网络
? 设置时间
初始化机器人
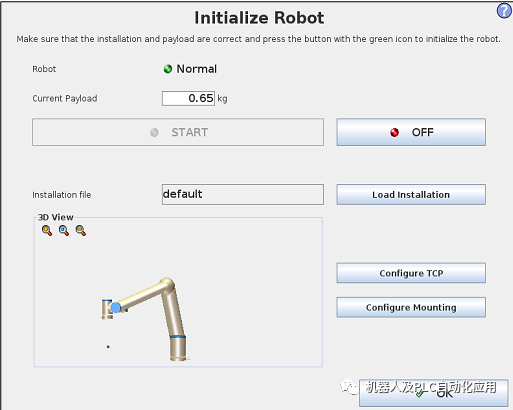
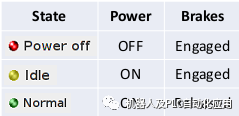
? 机器人状态
初始化机器人
? 检查负载设置
? 点“开”:上电
? 点“启动”:释放刹车
反驱动模式
当靠近碰撞区域,用反驱动模
式拉机器人手臂到安全位置
? 语言
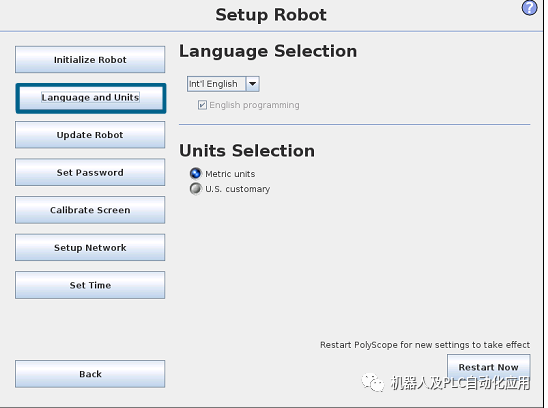
? 20 种语言
? 编程选用英语时可保持程
序指令名字为英语
单位
? 公制
? 英制
设置密码
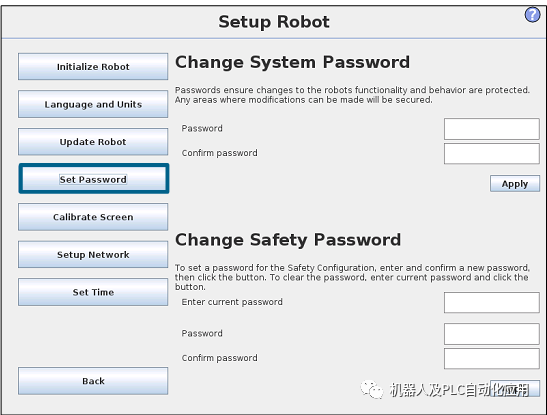
? 系统密码
? 密码保护限制进入软件
? 安全密码
? 修改安全设置时需要密码
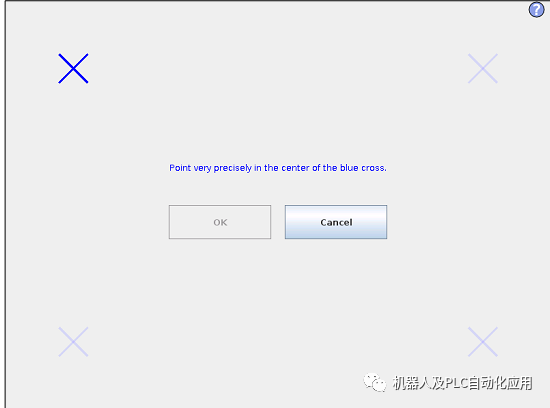
? 校准触摸屏
? 点中四个角的校准符号
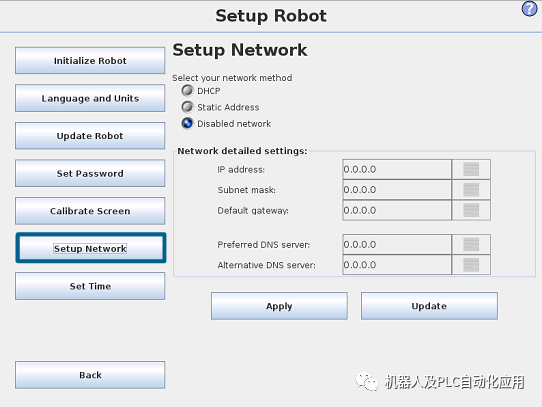
校准屏幕
? 网络参数配置
在这个菜单能设置机器人的IP 地址 设置网络.
设置时间
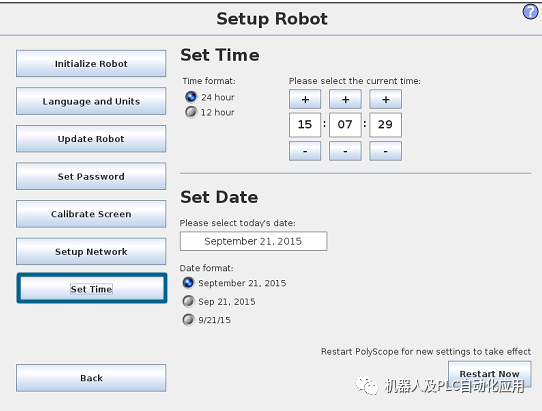
? 时间
? 时间格式
? 24 小时
? 12 小时
? 日期
? 日期格式
机器人编程
? 窗口概览
程序
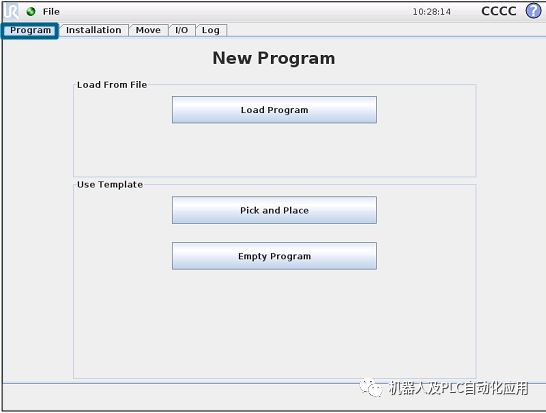
? 导入现有的程序
? 创造新程序
安装设置窗口
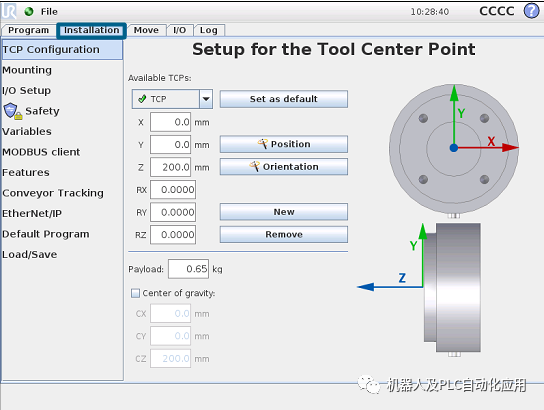
? 设置
? 环境设置
? 安全设置
移动窗口
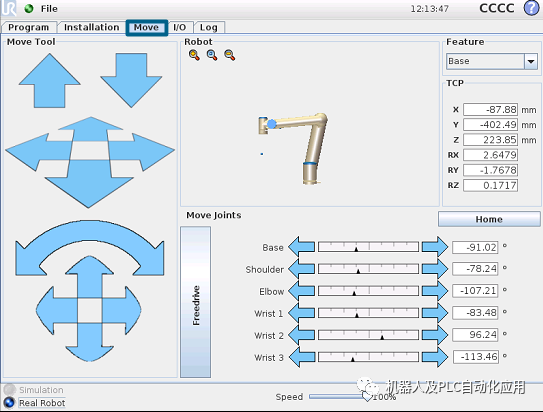
移动
? 手动示教机器人
? 显示实际位置
责任编辑:xj
原文标题:UR 优傲机器人简单操作
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
213文章
29835浏览量
213736 -
优傲机器人
+关注
关注
0文章
23浏览量
6167
原文标题:UR 优傲机器人简单操作
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
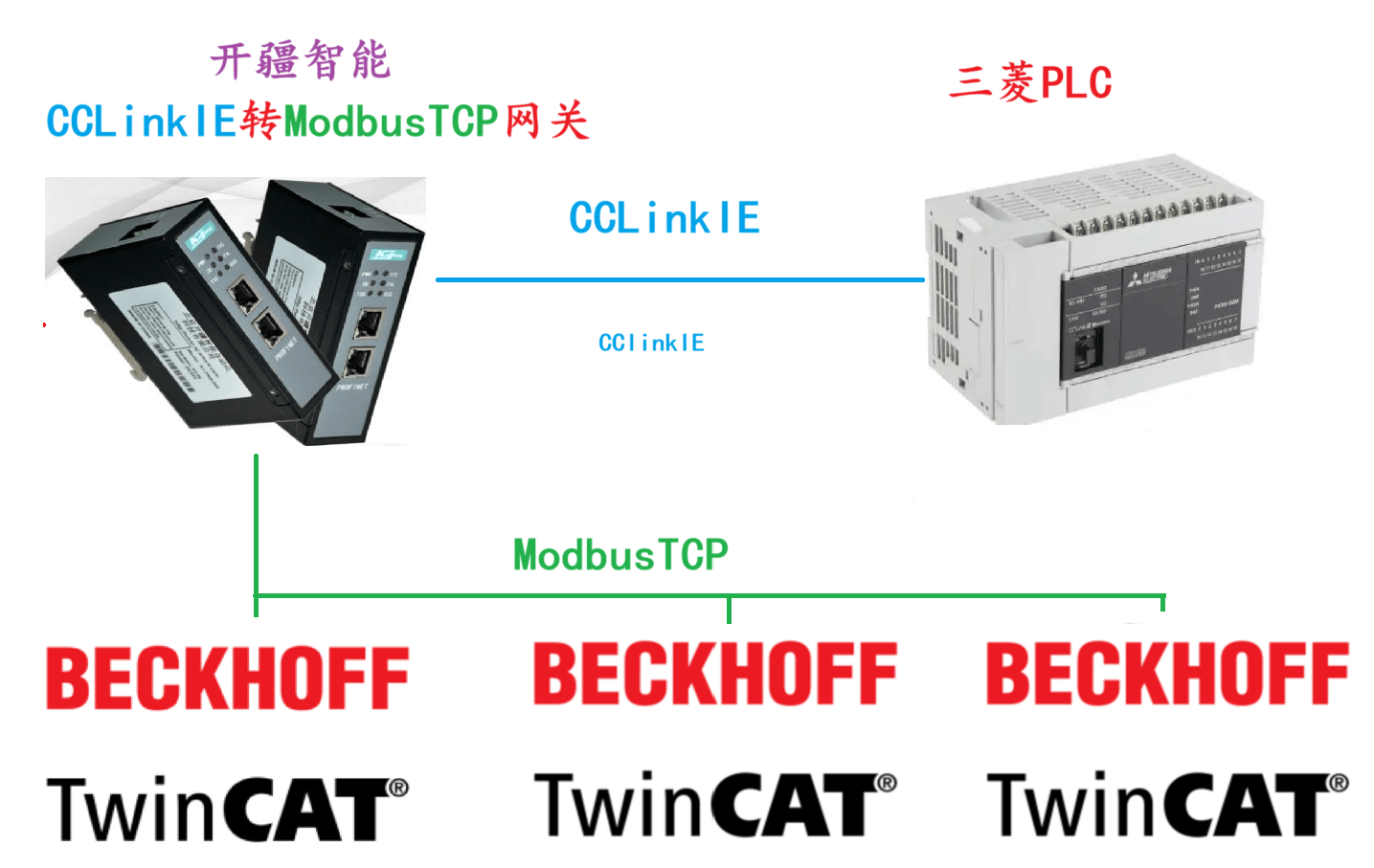
开疆智能CCLinkIE转ModbusTCP网关连接傲博机器人配置案例





 工商网监
工商网监
评论