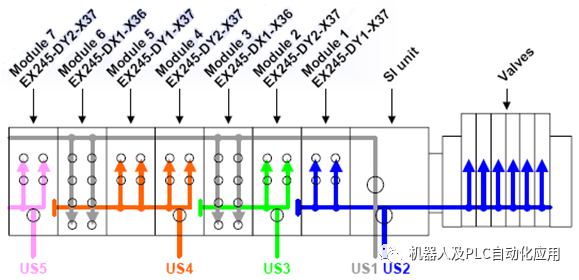
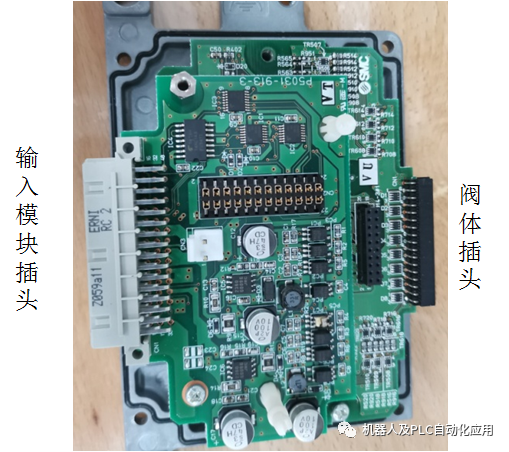
 机器人US2时阀导的输入模块无故障
机器人US2时阀导的输入模块无故障

1.给上使能后SF灯亮没有阀的输出 更换阀头

给上”使能”后US2电给供给,SF灯亮,通过机器人控制阀导无输出,阀部动作证明不是单纯的某一个阀损坏,更换阀头故障解决。
2.给上使能后输入信号全无
在机器人没有给上”使能”US2时阀导的输入模块无故障,显示正常。给上使能后输入模块的输入点都无电,相当于给输入模块断US1。更换阀头EX245模块。
US1电源供给故障存在故障
3.给上使能后输出阀组的第一位信号自动给入,SF灯亮。
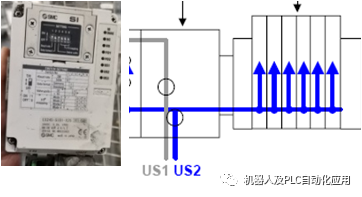
在机器人没有进行控制的时候,就有阀导的电,对其余阀进行控制不能控制,阀无动作。
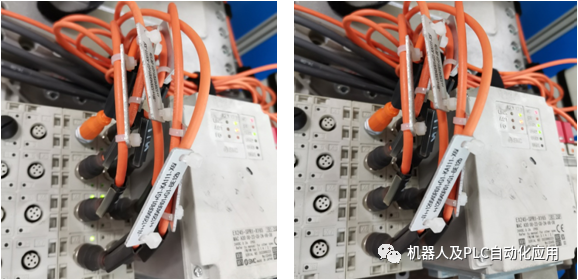
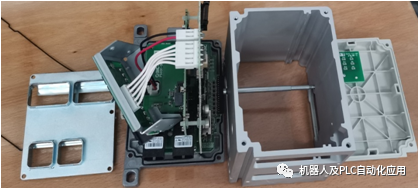
拆卸阀体测试

拆卸损坏的阀头

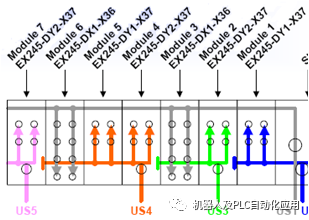
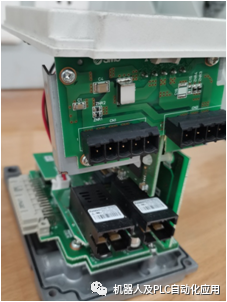
US电源分配板

电源分配板
拆解完毕
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电源
+关注
关注
185文章
18439浏览量
257493 -
机器人
+关注
关注
213文章
29949浏览量
214483 -
控制阀
+关注
关注
1文章
94浏览量
14204
发布评论请先 登录
相关推荐
热点推荐
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人
发表于 04-30 01:05
电机软启动器无故障报警停机原因分析与控制系统改造
:电机软启动器无故障报警停机原因分析与控制系统改造.pdf
【免责声明】本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,删除内容!
发表于 04-27 19:29
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating S
发表于 04-27 11:24
库卡KUKA机器人常见故障维修
; ⑤盘管灌溉不足; 2.维修期间KUKA机器人伺服电机过热故障排除 ①降低电源电压(例如,调整电源变压器的抽头); ②增加电源电压或更换电源; ①修理铁芯并排除故障; ①减载;按照规
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
手机为平台的移动互联网时代,下一个以机器人为核心的智能机器人时代,是否也会遵循这样的逻辑?
随着ROS 2的诞生,智能机器人开发迎来新篇章 ,它不仅为开发者提供了更为强大、灵活的工具,
发表于 03-03 14:18
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行提供更加全面的感知
发表于 12-29 23:04
翼菲并联机器人通过MTBF 20000小时认证
经过严格而全面的测试,翼菲并联机器人成功通过MTBF(平均无故障工作时间)20000小时认证,这一里程碑式的成就,不仅标志着翼菲机器人在可靠性方面达到了国际领先水平,更是国内并联机器人
焊接机器人常见故障及排查
的迹象。 检查紧固件: 确保所有紧固件都已正确拧紧,没有松动。 检查过载保护: 如果机器人有过载保护,检查是否因为过载而停止工作。 2. 电气故障 故障现象:
机器人维修思路是什么?
发那科(FANUC)机器人维修是一个复杂但系统的过程,涉及多个方面的检查和修复。以下是对发那科机器人维修的详细解析: 一、详细检查与定位故障 1. 驱动器检查: 检查驱动器是否正常工作,有无故
开源项目!用ESP32做一个可爱的无用机器人
/Kawaii-Useless-Robot
也可以“可爱的无用机器人”打包下载所有3D打印文件。
项目链接:https://www.instructables.com/Kawaii-Useless-Robot-2024-Edition/
项目作者:tobychui
*附件:可爱的无用
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,机器人启
发表于 08-30 14:50





 工商网监
工商网监
评论