 关于GPT12正交编码器输入译码开发案例的分析和介绍
关于GPT12正交编码器输入译码开发案例的分析和介绍

案例内容概览
1.1 功能开发需求
1.3 GPT12解码原理
1.4 MCU引脚资源分配
1.5 GPT12时钟源
1.6 GPT12的Port配置
1.7 GPT12的增量接口配置
1.8 代码实现
1.9 问题与解决
1.10 附录-增量编码输入示波器波形
(1)正转
(2)正转清零
(3)反转
1.1 功能开发需求
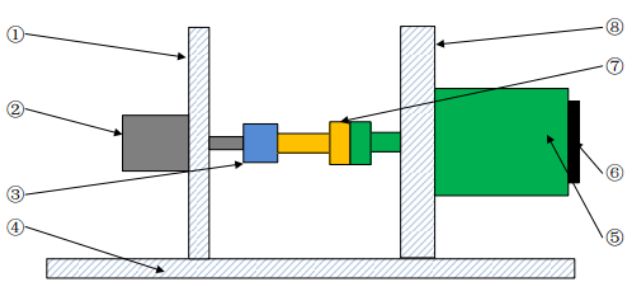
在某款汽车电子产品的电机转子位置RPS传感器的精度性能评价测试中,需采用高精度编码器对电机转子位置进行同轴同步高精度采集,以实现对标电机端RPS传感器是否合格。此图为性能评价测试工装示意图。
工装图注说明:
①编码器工装;②高精度编码器;③刚性联轴器;④工装底座面板;
⑤电机本体;⑥电机位置RPS传感器;⑦爪型联轴器;⑧电机工装侧板。
开发需求:
电机的⑥处位置&角速度传感器的精度需要根据同轴的外部②处的正交编码器进行校准,因此我们需要将ECU捕获到②和⑥的信号进行对比一致性,开发MCU程序实现:由GPT12直接捕获正交编码器A、B、Z三路信号直接结算的模块和功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2567文章
53158浏览量
769028 -
电机
+关注
关注
143文章
9323浏览量
149948 -
正交编码器
+关注
关注
0文章
16浏览量
10781
发布评论请先 登录
相关推荐
热点推荐
伺服电机编码器怎么选型
伺服电机编码器的选型是一个综合性的过程,需要考虑多个因素以确保所选编码器能够满足系统的性能要求。以下是一些关键的选型步骤和考虑因素: 一、明确应用需求 首先,需要明确伺服电机编码器的应用需求,包括

定时器是不是有编码器输入功能?
你好,我想请教一下定时器是不是有编码器输入功能,是高级定时器和通用定时器都有吗,还是不一定,具体要看手册,能帮我看一下STM32G473有几
发表于 03-11 07:07
编码器常见的故障问题及案例分析
编码器作为自动化控制系统中的重要组件,负责将机械位移转换为电信号,以供上位机、PLC或驱动器等设备读取和处理。然而,在使用过程中,编码器可能会遇到多种故障。以下是对编码器常见故障及案例
DISCOAA编码器性质特点
。它们广泛应用于各种工业、机械和自动化系统中。根据工作原理和测量类型,编码器可以分为多种类型,如绝对式编码器和增量式编码器,以及电磁式、光电式、电感式、电容式、激光式等不同工作原理的编码器
DISCOAA编码器类型功能
DISCOAA编码器可能包括绝对编码器和增量编码器两种类型,其主要功能是将输入信号进行分析和处理,并将其转换为数字信号 ?。
编码器与译码器:功能、原理及应用解析
在数字电子技术的浩瀚星空中,编码器和译码器如同两颗璀璨的星辰,它们各自扮演着至关重要的角色,共同编织着信息传输与处理的精密网络。今天,就让我们一同深入探索这两者的奥秘,揭开它们如何在现代电子系统中发
拉线编码器关键参数详解
在工业自动化和精密测量领域,拉线编码器以其高精度、长寿命和灵活的安装方式,成为了众多应用场合的首选。然而,面对市场上琳琅满目的拉线编码器产品,如何挑选一款符合自己需求的编码器,成为了许多工程师和采购人员面临的挑战。本文将详细
增量编码器与绝对值编码器的区别
增量编码器与绝对值编码器的区别:增量编码器与绝对值编码器在精度特点对比
增量编码器的精度取决于脉冲的数量和测量的细分程度,通常情况下,其精度

二进制编码器与绝对编码器的区别
编码器是工业自动化和机器人技术中不可或缺的组件,用于将机械位置或运动转换为电信号。二进制编码器和绝对编码器是两种常见的编码器类型,它们各自有着独特的特点和应用场景。 二进制
二进制编码器应用场景 二进制编码器与模拟编码器比较
限性。 二进制编码器概述 二进制编码器是一种将输入信号转换为二进制代码的设备。它通常用于数字系统中,将模拟信号或非二进制信号转换为二进制形式,以便数字电路可以处理。二进制编码器的主要特
二进制编码器工作原理 如何选择二进制编码器
二进制编码器是一种数字电路,它将输入的二进制代码转换为对应的输出信号。在数字系统中,编码器用于将数据从一种形式转换为另一种形式,以便于处理和传输。 二进制编码器工作原理
变频器与编码器的连接方式
对电机位置的精确控制。连接编码器信号线:根据编码器的信号输出方式,将其信号线连接到变频器的相应端子上。对于增量式编码器,需要将A相、B相和Z相信号线分别连接到变频

磁电编码器和光电编码器的区别
的传感器。在工业自动化、机器人、航空航天等领域,编码器发挥着至关重要的作用。根据工作原理的不同,编码器可以分为磁电编码器和光电编码器两大类。





 工商网监
工商网监
评论