 机器人底盘种类介绍
机器人底盘种类介绍

要实现机器人的自主移动,定位导航技术是关键,由于定位导航技术在实现上具有很高的门槛,基于机器人底盘直接进行上层开发的机器人企业越来越多。它可帮助机器人企业降低研发成本,快速抢占市场先机。
机器人底盘集成了众多不同的传感器,包括激光雷达、视觉、超声波、红外传感器等,以及轮子等必要的悬挂。而将这些硬件进行集合的,则是相应的算法及软件。
稳定性检验机器人底盘好坏最为重要的标准,其次还包括了能耗、承载能力及后期的维护成本等。
不同的机器人产品对底盘的要求也不相同,如扫地机器人需要低成本的激光导航方案,其他服务机器人需要兼具灵活性与安全性的激光雷达+视觉的导航方案,工业AGV则需要更具精准性的导航方案。
根据机器人底盘种类的不同,目前,市面的机器人底盘主要有履带式及轮式机器人底盘之分。
履带式机器人底盘
履带式机器人底盘在特种机器人身上使用较多,可适用于野外、城市环境等,能在各类复杂地面运动,例如沙地、泥地等,但速度相对较低,且运动噪声较大。
轮式机器人底盘
轮式机器人底盘是目前服务机器人企业使用较多的底盘,主要有前轮转向后轮差速驱动、两轮驱动+万向轮、四轮驱动之分。
1.前轮转向+后轮驱动
前轮转向+后轮驱动的轮式机器人底盘主要采用电缸、蜗轮蜗杆等形式实现前轮转向,后轮只要一个电机再加上差速减速器,便可完成机器人的移动要求。具有成本低、控制简单等优缺点,但缺点在于转弯半径较大,使用相对不那么灵活。
2.两轮驱动+万向轮
两轮驱动+万向轮可根据机器人对设计重心、转弯半径的要求,将万向轮和驱动轮布置不同的形式,结构及电机控制也相对简单,机器人灵活性较强,且算法易控制。
3.四轮驱动
四轮驱动在直线行走上能力较强,驱动力也比较大,但成本过高,电机控制较为复杂,为防止机器人打滑,需要更精细的结构设计。
从灵活性上来说,两轮驱动+万向轮的轮式机器人底盘更具优势,思岚科技的机器人底盘ZEUS就采用了这种结构的设计。它能做到自主定位建图、路径规划及自主避障等功能,可在各种障碍物之间穿梭自如。
ZEUS机器人底盘作为底盘界的老大,不仅能识别周围环境,还能清楚了解自己所在位置,同时采用SharpEdge构图技术,构建厘米级高精度地图。
除了搭载自主研发的雷达及定位导航系统, ZEUS还配备了深度摄像头、超声波、防跌落等传感器,保证机器人的安全运行,防止机器人出现碰撞现象。
当然,ZEUS不仅为机器人提供了最基本的行走能力,同时还支持虚拟墙和虚拟轨道、自主返回充电、第三方应用拓展及楼层建图导航,自动电梯控制等多种功能。
在机器人行业日益火热的现状下,机器人底盘的出现无疑降低了其他企业进入机器人行业的门槛,同时,也为移动机器人的规模化发展铺平道路。
发布评论请先 登录
工业机器人的特点
盘点#机器人开发平台
详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
不同类型机器人及其所需的滑环种类
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】+两本互为支持的书
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
七腾机器人:防爆轮式机器人-四轮八驱全新上线

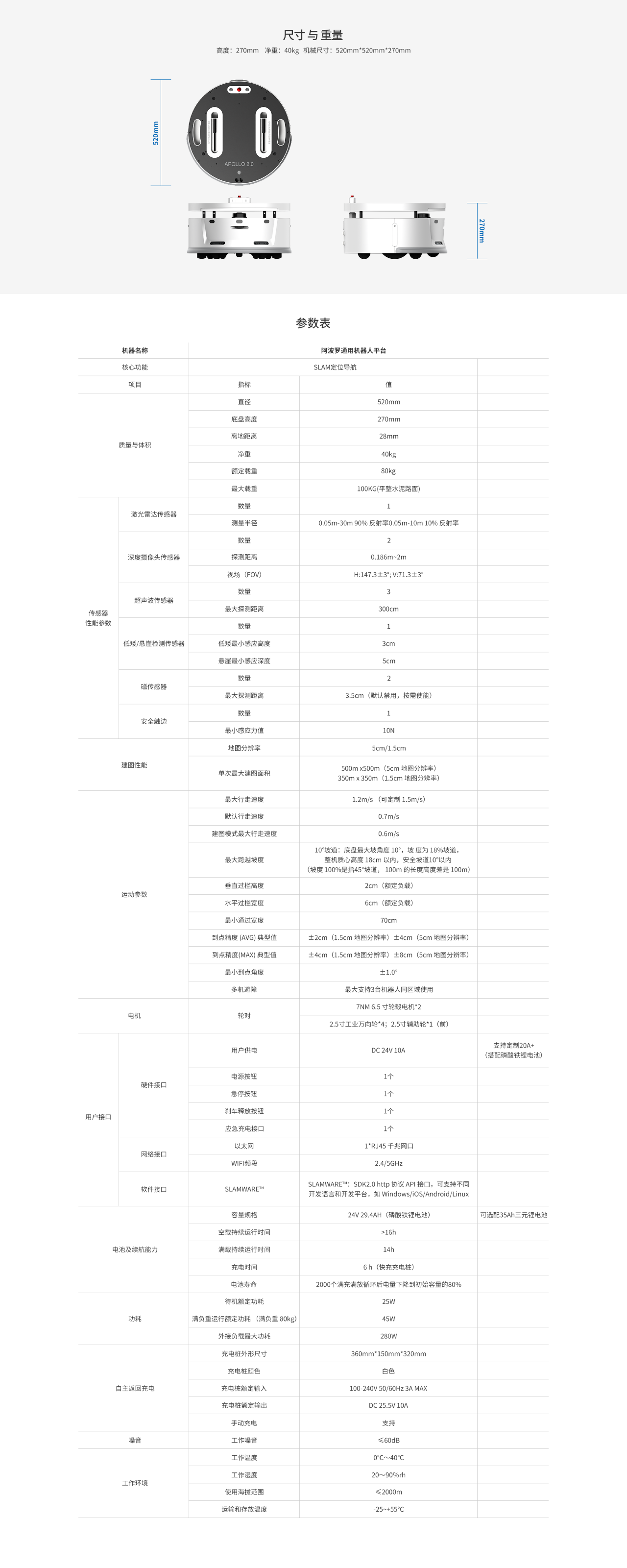
思岚科技全场景机器人底盘Apollo2.0的特性





 工商网监
工商网监
评论