 电子发烧友App
电子发烧友App


关键词:本机振荡器 直接数字频率合成 自动频率控制 脉内测频
雷达系统根据其工作频率一般分为米波雷达、分米波雷达和厘米波雷达,其接收机通常是超外差形式的。分米波雷达和厘米波雷达由于其工作频率较高,一般都有自动频率控制(AFC)系统,控制本振频率自动跟踪发射频率的变化,或者控制发射频率自动稳定在本振频率对应的频率点上,保证雷达接收机的中频频率稳定。但是传统的模拟式单环路或双环路AFC系统由于受模拟电路本身的局限,使得AFC的跟踪速度慢、跟踪频率范围窄、精度低,甚至有可能出现错误跟踪的情况;此外,控制本振的自频控雷达由于在本机振荡器上加装了频率调整装置,影响了本振的频率稳定度,这对动目标雷达而言是难以接受的。米波雷达由于其工作频率较低,基本上没有自动频率控制系统,但是米波雷达的发射机工作频率和接收机本机振荡频率由于环境温度、电源电压和负载变化而发生一定的变化,其变化范围从几十千赫兹到数百千赫兹,通常在500~600kHz之间。虽然由此造成的中频频率变化量的绝对值不会超出中频放大器的通频带范围(中频放大器的通频带通常≤1MHz),但是数百千赫兹的变化量使回波信号不能得到最有效的放大,造成雷达接收机技术、战术性能降低,此时即使加装DSU(Digital Stable Unit)设备,也由于中频频率漂移的影响,使DSU的性能无法得到最有效的发挥。
应用锁相环频率合成技术实现雷达自动频率控制系统已经是比较成熟的技术方案,这种方案的应用解决了非相参雷达的自动频率跟踪与本振频率稳定度之间的矛盾,但是锁相环固有的大惯性、大步进间隔和非线性误差却严重地限制着锁相环自动频率控制系统的性能,使其无法满足高速、高频率分辨率、大带宽的要求。
DDS技术是近几年来迅速发展的频率合成技术,它采用全数字化的技术,具有集成度高、体积小、相对带宽宽、频率分辨率高、跳频时间短、相位连续性好、可以宽带正交输出、可以外加调制的优点,并能直接与单片机接口构成智能化的频率源。基于DDS技术的自适应米波雷达自动频率控制系统是新一代的自动频率控制(AFC)系统,它以直接数字频率合成技术(DDS)为基础,以单片机为控制核心,通过高速高精度脉内频率测量模块对雷达发射频率进行精确测量,然后由单片机控制DDS,对发射频率进行搜索和跟踪。因此它是一种易于实现的数字式智能化自适应频率控制系统。
图2 DDS频率合成模块结构图
1 系统组成及工作原理
基于DDS技术的自适应米波雷达自动频率控制系统主要由高速脉内频率测量模块、DDS频率合成模块、单片机和包括频率显示、控制键盘的人机接口模块组成,如图1所示。
系统采用高速高精度实时脉内频率测量技术,利用频率稳定度高达10-9的高稳恒温时标对频率进行倒计数法测量,由单片机对测量结果进行分析处理,并控制DDS频率合成模块,完成对发射频率的搜索和跟踪。系统中除了DDS输出后的滤波、放大电路采用模拟电路外,其它全部采用高速数字电路,并结合了单片机具有的可编程能力,使系统避免了传统模拟式AFC的缺陷,能够实现更加灵活的控制。
雷达开机后,系统首先工作于搜索模式:单片机控制DDS频率合成模块输出本振频率的最低值,与从发射机耦合过来并经过衰减后的发射脉冲频率混频, 取出下变频后的中频信号,经过频率测量模块测量后将结果送入单片机,单片机若判断频率测量结果不是规定的中频频率值,则控制DDS频率合成模块将输出的本振频率按规定的步长(通常是频率测量系统的频率分辨率)调高,重复此过程,直到频率测量系统测量得到的频率值为规定的中频频率值为止。若搜索过程中本振频率达到上限时仍未搜索到规定的中频频率值,则返回到本振频率最低值,重新开始新一轮的搜索。系统一旦搜索到规定的中频频率值就进入跟踪状态。
取出下变频后的中频信号,经过频率测量模块测量后将结果送入单片机,单片机若判断频率测量结果不是规定的中频频率值,则控制DDS频率合成模块将输出的本振频率按规定的步长(通常是频率测量系统的频率分辨率)调高,重复此过程,直到频率测量系统测量得到的频率值为规定的中频频率值为止。若搜索过程中本振频率达到上限时仍未搜索到规定的中频频率值,则返回到本振频率最低值,重新开始新一轮的搜索。系统一旦搜索到规定的中频频率值就进入跟踪状态。
在跟踪状态,频率测量模块对每一个发射脉冲频率与本振频率下变频得到的中频脉冲频率进行实时精确测量,在发射脉冲结束时将测量结果送入单片机。单片机立即根据测量结果计算出响应的本振频率调整量,并控制DDS频率合成模块调整输出频率,保证在目标回波信号到达接收机时,本振信号已经调整到与该发射脉冲频率对应的频率点上,使目标回波信号下变频后的频率值为准确的中频频率值,从而保证目标回波信号能够得到最有效的放大。
跟踪模式实质上是一个自适应的控制过程:某一发射脉冲的频率比前一发射脉冲的频率升高(降低)→在本振频率不变的条件下,中频频率升高(降低)→频率测量模块的测量结果升高(降低)→单片机得到测量结果后控制DDS频率合成模块,使之输出的本振频率相应升高(降低)→中频频率降低(升高)到规定值。
2 硬件结构
2.1 DDS频率合成模块
DDS频率合成模块以DDS芯片AD9854为核心,包括滤波电路、放大电路和与单片机的接口电路,图2是其组成框图。
AD公司推出的AD9854是DDS芯片中的典型代表之一,它具有300MHz的内部时钟,4~20倍的内部可编程倍频器使外部输入的时钟信号频率可以从15MHz到75MHz,另外具有100MHz的并行接口总线,内置正交双通道DAC输出,具有多种编程工作方式,能产生线性调频信号和非线性调频信号等复杂信号。
AD9854采用CMOS结构,工作电压为3.3V,而单片机AT89C51工作在5V电压下,其总线电平是5V的TTL电平,为保证AD9854的正常工作,必须经电平转换后再与AD9854接口,AD9854的时钟信号也必须经过电平转换后送到AD9854的时钟引脚。AD9854有正交双通道DAC输出,每一个通道都是反相的互补输出,经MAX436放大后滤波,然后再经MAX436放大到雷达要求的本振电平。 两路输出中的一路用于和发射脉冲混频,将下变频后的中频信号送到频率测量模块进行频率测量,系统已经知道DDS频率合成模块输出的本振频率,测量出发射脉冲的中频频率就能计算出发射频率;另一路作为接收机的本振信号。
两路输出中的一路用于和发射脉冲混频,将下变频后的中频信号送到频率测量模块进行频率测量,系统已经知道DDS频率合成模块输出的本振频率,测量出发射脉冲的中频频率就能计算出发射频率;另一路作为接收机的本振信号。
根据奈奎斯特采样定律,当DDS系统的时钟为300MHz时,其输出频率的上限是150MHz,在工程应用中通常只使用到时钟频率的40%,即120MHz。某型米波雷达的本振频率上限略高于120MHz,经查阅AD9854的数据手册,其输出频率能够达到理论的150MHz;同时经实验证实,AD9854能够在雷达本振频率上限值处稳定工作,且输出信号质量完全可以满足雷达系统对本振的要求。
2.2 高速高精度脉内频率测量模块
高速高精度脉内频率测量模块采用倒计数法进行频率测量,主要由下变频混频器、滤波整形电路、计数器T0、计数器T1和时序控制电路组成。图3是其结构的组成框图,图4是倒计数法频率测量的时序图。
倒计数法测频是用被测信号的N个周期形成一个计数门时间T=N·Tx,在T时间内由时标F0计数,这样一来测频就相当于测量门宽T,T的最大量化误差是T0,Tx的最大量化误差是T0/N。
某型雷达的发射脉冲的宽度是13μs,考虑到其发射机是单级振荡式发射机,每个脉冲在起振和停振的过程中振荡不稳定,因此取中间的10μs作为测频区间。该型雷达的第一中频频率为30MHz,在正常工作时,发射脉冲与本振信号下变频的输出频率应该是准确的30MHz,在10μs的测频时间内应有300个脉冲,即可取N=300;高稳定的时标的频率是100MHz,T0=10ns,相应的Tx的最大误差是T0/300=1/30ns,据此可计算出测频的分辨率是30kHz,相对于雷达中频放大器接近1MHz的带宽而言,此指标完全能够满足雷达系统的要求。用频谱分析仪实际测得的系统跟踪误差如表1所示。
表1 实际测得的系统跟踪误差表
| 发射频率/MHz | 147.000 | 147.500 | 148.000 | 148.500 | 149.000 | 149.500 |
| 本振输出频率/MHz | 116.999 | 117.495 | 118.008 | 118.492 | 118.990 | 119.493 |
| 跟踪误差/kHz | -1 | -5 | +8 | -8 | -10 | -7 |
| 发射频率/MHz | 150.000 | 150.500 | 151.000 | 151.500 | 152.000 | 152.500 |
| 本振输出频率/MHz | 119.995 | 120.490 | 120.990 | 121.510 | 122.005 | 122.500 |
| 跟踪误差/kHz | -5 | -10 | -10 | +10 | +5 | 0 |
模块的工作过程是:当雷达触发脉冲到来时,时序控制电路打开计数器T,发射脉冲随后到来,经下变频、滤波、整形后转换成TTL方波作为计数器T的时钟。当计数器T计到第32个脉冲时,时序控制电路打开计数器T0,T0开始对高稳定时标计数;当计数器T计到第332个脉冲时,时序控制电路关闭计数器T和T0,并通知单片机已经完成一次频率测量,单片机取走测量结果,并对硬件电路复位,准备下一个周期的测量。
2.3 高稳定度恒温时钟模块
本机振荡器的频率稳定度是影响雷达接收机性能的关键性指标。由于DDS频率合成方法的输出频率稳定度仅仅取决于其时钟的频率稳定度,因此选用频率稳定度高达10-9的恒温晶体振荡器作为整个系统的时钟。恒温晶体振荡器输出的100MHz高稳正弦波经放大后整形为标准的TTL方波,一路作为频率测量模块的时间标准,另一路经F161分频为25MHz的TTL方波,经电平转换后作为AD9854的外部时钟信号,利用AD9854内部的可编程倍频器倍频12倍使AD9854工作在300MHz的内部时钟频率下。高稳定度恒温时钟模块组成框图如图5所示。
3 软件结构
单片机是整个系统的控制核心,可以充分利用软件可编程控制的优势对系统进行灵活有效的控制。图6是单片机的软件框图。
通电以后单片机首先进行初始化,然后设置DDS模块的工作模式等参数,再进行时序控制电路的复位并对所有计数器进行清零操作。随后单片机不断查询测量完成信号。当时序控制电路在雷达触发脉冲的作用下完成一次测量时?熏就通过该信号通知单片机,单片机一旦查询到测量完成便立即读入测量结果。然后进行分析,是标准中频频率时不进行本振频率的调整,直接准备下一脉冲周期的测量,若不是则计算所需的频率调整量,控制DDS频率合成模块进行频率调整,然后再准备下一脉冲周期的测量。
搜索和跟踪过程的区别主要在于计算频率调整量的方法不同,其它流程基本一致。
基于DDS技术的自适应米波雷达本振自动频率控制系统集DDS技术的先进性、全数字脉内频率测量的实时性和单片机软件可编程的灵活性于一体,实现了对每一个发射脉冲的发射频率的实时测量和跟踪,是一种全新的雷达自动频率控制系统。在研制过程中解决了高速全数字频率测量模块的设计与实现、高稳定度高频谱纯度频率合成等技术难题;同时由于雷达发射机没有单独组舱,发射信号的场强很大,对系统的抗干扰能力提出了很高的要求,在技术上采取了精心设计印刷电路板、严格区分模拟地和数字地以及严格的屏蔽等措施,整个系统具有跟踪精度高、跟踪范围大、速度快、工作稳(接上页)
定可靠的优点。该系统结构简单、体积小、成本低,在国产某型雷达上已经成功使用,显著提高了该型雷达的技术、战术性能。
- 控制系统(108281)


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
相关推荐
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能
自适应数字传感器设计
自适应逆变电源的设计与实现
ADAS系统无人驾驶的眼睛毫米波雷达
Ameya360 汽车雷达系统解决方案
CMOS技术实现的微型化毫米波传感器
MRAS无速度传感器矢量控制系统
PSoC怎么设计一个倒车雷达控制系统?
[下载]交直流传动系统的自适应控制
一种基于DDS器件AD9951的射频正弦波信号发生器设计
一种基于DDS器件AD9951的射频正弦波信号发生器设计
一种永磁同步电机模糊自整定自适应积分反步控制方法
两关节机械手的自适应控制介绍
双向同步自适应时钟技术
变步长LMS自适应滤波算法及其分析
在电机DSP控制系统中怎么实现离散模型参考自适应算法?
基于AccelDSP的自适应滤波器设计
基于红外摄像技术的自适应远光灯控制系统
如何利用毫米波雷达和图像传感器构建智能驾驶控制系统?
怎么设计嵌入式系统的自适应前照灯系统?
无线传感器网络的自适应交通灯控制系统
毫米波技术基础
毫米波雷达VS激光雷达VS超声波雷达
毫米波雷达工作原理,雷达感应模块技术,有什么优势呢?
毫米波雷达感知技术搭建车路协同系统的可行性
毫米波雷达方案对比
毫米波雷达模组,智能家居雷达感应技术,存在感应雷达方案
毫米波雷达(一)
毫米雷达波概述
汽车安全解决方案/雷达传感器
汽车防眩目自适应远光灯系统有哪些核心技术优势?
浅析车载毫米波雷达
漫谈车载毫米波雷达历史
激光雷达在无人驾驶技术中的应用解析
车载毫米波雷达的技术原理与发展
高级辅助驾驶ADAS技术
基于自适应逆控制实现的直流调速系统
 24
24鲁棒自适应控制综述A survey of robust ad
40DCS自适应智能控制在步进梁加热炉燃烧控制系统中应用
45自适应配料控制系统在水泥磨料过程中的应用The Applic
12自适应配料控制系统在水泥磨料过程中的应用The Applic
14基于MATLAB的时变系统自适应控制的仿真
36基于WinFACT的模糊控制系统设计
8新型自适应速度观测器在异步电机直接转矩控制系统中的应用
22自适应控制在网络化控制系统中的应用
13基于LabVIEW和Simulink的自适应控制
52基于自适应模糊PID控制器的温度控制系统
39基于多模型自适应控制器的感应电机变频调速系统
24网络控制系统的模糊自适应PID控制
8基于自适应模糊PID控制器的温度控制系统
72参数自适应模糊PID控制器的设计
 2223
2223
自适应前照灯控制系统(AFS)原理介绍
2735时变非线性系统的自适应逆控制仿真
30一种L1自适应控制方法设计阵风减缓控制系统设计
15短波频率自适应通信技术解析
13500详细剖析ACC自适应巡航系统
30472基于分层模糊系统的自适应H∞控制器设计
0基于自适应动态规划的SVC自适应优化控制策略
19自适应模糊神经网络的交通灯控制系统的设计
2747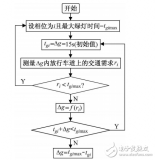
无线传感器网络的自适应交通灯控制系统
2617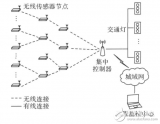
什么是自适应控制_自适应控制基本原理
54586自适应控制的优缺点_自适应控制存在的问题及发展
46896以PIC单片机为核心微机控制系统的步进电机自适应控制技术研究
1005
自适应巡航是什么
34472Traxen推出智能自适应巡航控制系统iQ-Cruise
1944机载雷达空时自适应处理技术的研究资料说明
0神经网络自适应控制及其发展应用
11何谓自适应前照灯控制系统?其有何功能?
5107
自适应前照灯控制系统
635
机载雷达空时自适应处理技术
694
自适应巡航系统的组成及原理
458
毫米波雷达的自适应波束成形技术:提升感知精度的前沿探索
196- 设计技术
- 可编程逻辑
- 电源/新能源
- MEMS/传感技术
- 测量仪表
- 嵌入式技术
- 制造/封装
- 模拟技术
- RF/无线
- 接口/总线/驱动
- 处理器/DSP
- EDA/IC设计
- 存储技术
- 光电显示
- EMC/EMI设计
- 连接器
- 行业应用
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶:huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉:mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华:lanhu@huaqiu.com
- 投资合作
- 曾海银:zenghaiyin@huaqiu.com
- 社区合作
- 刘勇:liuyong@huaqiu.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察



{kind=link}
版权所有 ? 深圳abg欧博电子有限公司
电子发烧友 (电路图) 粤公网安备 44030402000349 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号
评论